For maximum effectiveness, the first missile fired at a target should strike that target. Cost, size, and the necessity for surprise prohibit the firing of ranging shots (as was done with gun fire).
To strike the target on the first shot, the trajectory of the missile must be accurately controlled. This control is necessary because forces, natural or otherwise, can cause the missile to deviate from its predetermined course. Even though it functions perfectly, a missile without accurate guidance may miss a selected fixed target by several miles. Moving targets can take evasive action; without guidance, the missile would be unable to compensate for this action. Therefore, an accurate, fast-acting guidance system is of prime importance.
7A2. Definitions
The various systems of missile guidance were discussed briefly in chapter 6. This chapter deals with COMMAND GUIDANCE. The name means that intelligence (commands) is transmitted from an outside source while the missile is in flight. Current missiles controlled by command guidance include Regulus, Bullpup, and Nike.
A command guidance system incorporates two links between the missile and the control point.
One, an INFORMATION LINK, enables the control point to determine the position of the missile; the other, the COMMAND LINK, makes it possible for the control point to correct any deviations from the desired path.
7A3. Purpose and applications
The purpose of any guidance system is to secure direct hits on a selected target. Perfect performance is difficult to obtain because of natural disturbances and, in wartime, enemy countermeasures. However, because command guidance makes it possible to change the flight path of the missile by signals from the control
point, most of these difficulties can be overcome. It is reasonable to assume that command guidance can be used whenever it is possible to accurately determine the position of the missile during its flight. (But command guidance is not limited to missiles alone. It may be used for remote control of target drone planes or even ships.)
7A4. Basic principles
When command guidance is used, a ground, shipboard, or airborne station determines the position of the missile by radar tracking equipment or other means. It determines the error, if any, between the actual position of the missile and the desired position. It then sends out control impulses (commands) to bring the missile to the desired course.
If the flight path is long, and a large part of the path is over friendly territory or waters, several stations might track the missile as it comes into their range. These stations would then send commands to the missile to correct any deviations from the desired course.
7A5. Information links
The use of command guidance requires an accurate knowledge of the missile position, since all guidance comes from outside the missile. This knowledge is obtained through information links. The accuracy and dependability of the information link determines to a great extent the over-all accuracy of the complete system.
The information link enables the control point to determine the amount of error existing between the actual position of the missile and the desired position. Once this is known, correction signals can be sent to the missile.
Information links may use optical or electronic observation methods.
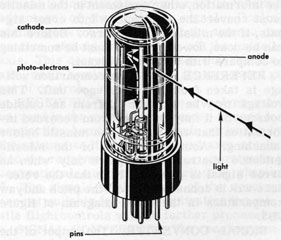
OPTICAL OBSERVATION. The optical, or visual, command guidance system has limited value, since the missile must always be visible from the command station. Such a system might use the unaided eye, telescopes, or optical rangefinders. But these devices are not
127
effective at long range; and smoke, fog, clouds, or darkness make them useless.
ELECTRONIC OBSERVATION. Much effort has been expended to develop an accurate and dependable electronic information link. A number of electronic systems have been designed and tested. The limitations of each system have been determined, and continuing efforts are being made to improve the most promising systems. Some electronic information links will be listed here, and more complete information on individual systems will be given later in this chapter.
7A6. Command links
The equipment used to send commands to a missile may be compared to a radiotelephone circuit between a piloted plane and a ground station. Instead of voice communications, the
instructions are sent as a single pulse or a series of spaced pulses. The pulses may be modulated or unmodulated, depending on the complexity of the system in use.
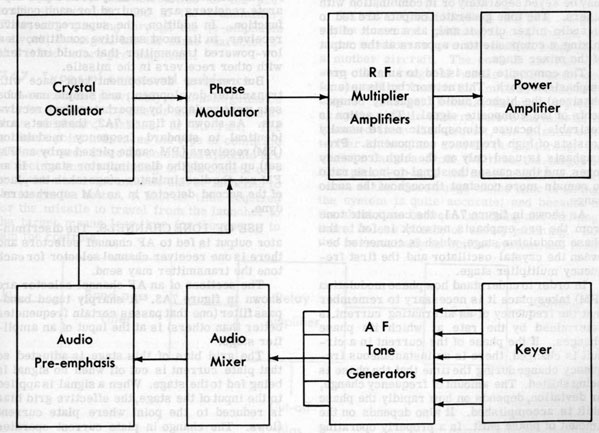
TRANSMITTERS. Early target drone command transmitters were simple one-tube units that sent out a pulse when keyed by the operator. This system made it possible to control the rudder. But to control engine speed and altitude, additional transmitters tuned to other frequencies were required. As a result, the system became so large and complex that it was unsuitable. Consequently, work was started on a simpler, more reliable transmitter that would reduce the number of radio frequency (RF) channels needed for command guidance. The result of this work is the modern command guidance transmitter, which is similar to any medium power PM (phase modulated) transmitter. A block diagram is shown in figure 7A1.
Figure 7A1.-Block diagram of a phase modulated command transmitter.
128
The transmitter uses a crystal-controlled oscillator for frequency stability and accuracy. Accurate frequency control is of prime importance since the command receiver in the missile is tuned to the command frequency before the missile is fired, and the receiver tuning cannot be changed while the missile is in flight. Therefore, the transmitter frequency must remain stable or the command link will be lost.
The output of the crystal oscillator is built up by RF amplifier stages. Some of these stages operate as frequency multipliers, but the output stage operates as a straight-through RF power amplifier.
TRANSMITTER MODULATION. The use of PM results in considerable saving of space, power, and cost, since modulation takes place at a low level and requires less audio power than does high level AM.
Modulation is in the form of tones that are generated by tone generators. Each generator may be keyed separately or in combination with others. The tone generator outputs are fed to an audio mixer circuit and, as a result of the mixing, a composite tone appears at the output of the mixer stage.
The composite tone is fed to an audio pre-emphasis network. This network builds up (emphasizes) the higher audio frequency components of the composite signal. This action is desirable because atmospheric noise usually consists of high frequency components. Pre-emphasis is used only on the high frequency tones, and thus causes the signal-to-noise ratio to remain more constant throughout the audio range.
As shown in figure 7A1, the composite tone from the pre-emphasis network is fed to the phase modulator stage, which is connected between the crystal oscillator and the first frequency multiplier stage.
In order to understand how phase modulation (PM) takes place it is necessary to remember that the frequency of an alternating current is determined by the rate at which its phase changes. If the phase of the current in a circuit is changed, there is an instantaneous frequency change during the time that the phase is being shifted. The amount of frequency change, or deviation, depends on how rapidly the phase shift is accomplished. It also depends on the amount of phase shift. In a properly operating PM system, the amount of phase shift is proportional to the instantaneous amplitude of the
modulating signal. The rapidity of the phase shift is directly proportional to the frequency of the modulating signal. Consequently, the frequency deviation in PM is proportional to both the amplitude and frequency of the modulating signal. Thus the crystal oscillator output signal is varied in both amplitude and phase by the modulating signal.
The RF section of the transmitter operates continuously, but is modulated only when one or more of the tone generators are operated by the keyer section.
RECEIVER. In the beginning, receivers used for remote control were simple one-tube super-regenerative sets. A relay was connected in the plate circuit of the tube; when a signal was applied to the input of the tube, its plate current changed and operated the relay. The closing of the relay contacts activated another circuit which moved the control surfaces.
The disadvantage of this system is that separate receivers are required for each control function. In addition, the superregenerative receiver, in its most sensitive condition, is a low-powered transmitter that could interfere with other receivers in the missile.
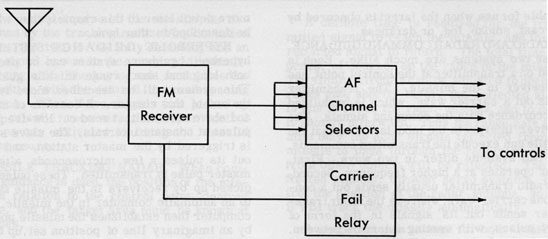
But receiver development kept pace with transmitter development, and simple one-tube sets were replaced by superheterodyne receivers. As shown in figure 7A2, these sets are identical to standard frequency modulation (FM) receivers (PM can be picked up by an FM set) up through the discriminator stage. In an FM set, the discriminator stage takes the place of the second detector in an AM superheterodyne.
USE OF TONE CHANNELS. The discriminator output is fed to AF channel selectors and there is one receiver channel selector for each tone the transmitter may send.
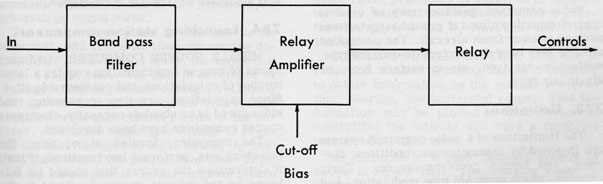
The sections of an AF channel selector are shown in figure 7A3. A sharply tuned band-pass filter (one that passes certain frequencies better than others) is at the input of an amplifier stage.
The grid bias of this stage is adjusted so that plate current is cut off when no signal is being fed to the stage. When a signal is applied to the input of the stage, the effective grid bias is reduced to the point where plate current flows. The change in plate current operates the relay; its contacts close, and activate the missile control surfaces.
129
Figure 7A2.-Block diagram of FM command receiver.
Not shown on the receiver block diagram, figure 7A2, is the de-emphasis network, which has opposite characteristics to the pre-emphasis network used in the transmitter. Thus, after passing through the de-emphasis network, the signal has the same characteristics it had before pre-emphasis.
7A7. Types of command guidance
As mentioned previously, command guidance may be exercised by one or more ground stations, shipboard stations, or aircraft. The guidance point influences the type of command guidance used. Since all command systems are subject to enemy jamming of the control circuit, the closer the missile can be launched to the target the better. A shorter time required for the missile to travel from the launcher to the target means less time for the enemy to jam the controls.
Electronic command guidance systems are divided into four principal groups.
TELEVISION GUIDANCE SYSTEM. Television command guidance is well suited for some missions where the control point is in a mother aircraft. The control aircraft can stay out of range of hostile antiaircraft defenses and yet launch the missile reasonably close to the target. Because the target is picked up by the missile camera before the missile is launched from the aircraft, the missile controller in the plane sees the target through the missile camera from the time the target is first picked up until the missile strikes. Because of the close range at the time of firing, the system is quite accurate; and because of the short time between launching and striking, there is less chance of enemy jamming. But this is essentially an optical system, and is not
Figure 7A3.-Block diagram of AF channel selector.
130
suitable for use when the target is obscured by overcast, smoke, fog, or darkness.
RADIO AND RADAR COMMAND GUIDANCE. These two systems are much alike. Each is based on a transmitter at the control point, and a receiver in the missile. The transmitter sends out a carrier wave, which is modulated in accordance with the command signals. The receiver interprets the modulation so that the missile can execute the transmitted commands. The two systems differ in two ways. First, radar operates at a higher frequency. Second, the radio transmitter usually sends out a continuous carrier wave, whereas the radar transmitter sends out its signals in the form of short pulses, with resting intervals between. Since both of these systems are treated in
more detail later in this chapter, they will not be described further here.
HYPERBOLIC GUIDANCE SYSTEM. A hyperbolic guidance system can be used for both long and short range missile guidance. This system will be described more fully at the end of this chapter. It consists of master and slave stations that send out low-frequency pulses at constant intervals. The slave station is triggered by the master station, and sends out its pulses a few microseconds after the master pulse is transmitted. These pulses are picked up by receivers in the missile and fed to an automatic computer in the missile. The computer then establishes the missile position by an imaginary line of position set up by the master and slave stations.
B. Radio Command System
7B1. Basic principles
A radio command system contains a means of accurately determining the missile position in relation to the control station, the target, and the desired trajectory. A computer is usually used to determine the error between the actual missile position and the desired position. A command transmitter is located at the control point, and a receiver is contained in the missile. The receiver activates the missile control circuits when it receives command signals from the transmitter. This equipment makes it possible to follow the missile' s flight and correct for errors which would cause a miss.
7B2. Applications
Radio command guidance may be used to control missiles aimed at ground targets from surface sites or from aircraft. The controlled missile may be of the surface-to-surface type, surface-to-air type, air-to-surface type, or air-to-air type.
7B3. Limitations
The limitations of a radio command system are imposed by transmission conditions, distance, and enemy countermeasures. Early systems, which used AM tone modulation, had additional limitations. As an example, an
interfering signal containing the control-tone frequency would cause the missile control surfaces to act. Often harmonics or sideband frequencies of voice-modulated carriers would upset the whole control system. Obviously, something had to be done if complete control was to be obtained .
The use of PM (phase modulation) eliminated a large part of the voice interference, but manmade interference with PM characteristics could still affect the control system. This disadvantage was overcome by using coded combinations of tone channels. With this system, no control operation can take place unless the proper tones appear at the missile receiver in the correct order and spacing. The adoption of this control method practically eliminates the chance that an interfering signal will duplicate the control combination.
7B4. Launching station components
MISSILE COURSE COMPUTER. Ordinary forms of course determination require a large number of calculations, and considerable time. Since calculations are time consuming, and since speed is an absolute necessity, electronic course computers have been developed.
The computer, located at or near the launching site, performs two functions. First, it determines the course that should be followed by the missile during its flight to the target. It then compares this desired course
131
with the actual course of the missile, as determined by the tracking radar. Any deviation between the two is instantly detected, and an error signal is sent to the command transmitter keying unit. The keying unit modulates the transmitter with the desired tone and spacing sequence. When these signals are picked up by the missile receiver, the proper control surfaces are activated to bring the missile back on course.
MISSILE TRACKING RADAR. When command guidance is used, the position of the missile in relation to the control point, desired course, and the target area must be known at all times.
Since radar can provide information as to range, elevation, and direction, it is well suited for short- and medium-range missile tracking. In general, missile-tracking radars use the same principles as search, fighter-director, and fire control radars.
Radar ranging is accomplished by time measurement. The range is found by measuring the elapsed time between the transmission of a pulse and the arrival of the echo reflected from the missile. Radar waves travel at the speed of light (186,000 miles per second). The distance to the target is found by multiplying the elapsed time by the speed of the radar wave and then dividing the result by two. The division by two is necessary because the elapsed time includes time out and time back, so that the actual time to the target is one-half the elapsed time.
The time sequence for the radar set is started in the timing generator. The trigger action of the timing generator controls the modulator section, which in turn produces the high-voltage output pulse.
The same trigger pulse is also sent to the range unit, and starts its time-measuring device. After a short, fixed delay, the range unit forms a range gate. The gate is developed by a voltage which is present during a relatively short part of the main time cycle. This voltage is applied to the gain control circuit of the receiver. When the range-gate voltage is present, the receiver gain is high; during the rest of the time cycle, the gain is very low. Thus, when the range gate is "open," signals picked up by the antenna will pass through the receiver; when the gate is "closed," they will not.
A definite time is required for the transmitted signal to reach the missile, and for the reflected signal to return. The total time depends, of course, on the range of the missile. The timing circuits can be adjusted to open the range gate shortly before the reflected signal is due to reach the radar antenna, and to close it shortly afterward. Thus the range gate permits only the echo signals reflected from the missile to pass through the receiver; echoes from other objects will be rejected. The reflected signals, through servo systems, control the position of the radar antenna, so that it will track the missile automatically.
A single antenna is used for both transmitting and receiving. This requires some means for switching the antenna from the transmitter to the receiver, and then back to the transmitter again. The device usually used for this purpose is called a duplexer. The duplexer makes it possible to operate the transmitter and receiver simultaneously, but keeps the powerful transmitter signals from entering the receiver directly.
For missile tracking, a lobing or conical scanning system is used, because accurate angle data cannot be obtained from a single beam on the antenna axis. This type of scanning is described in chapter 8.
Video signals produced by the reflected signal from the missile may be used to modulate the display on a cathode ray tube. The method of modulating the display will depend on the type of indicator used in the radar set. Either the deflection or the intensity of the beam trace may be modulated.
(The student interested in information on basic radar principles is referred to Supplementary Readings in Fundamental Naval Electronics, parts I and II, NavPers 10808 and 10809.)
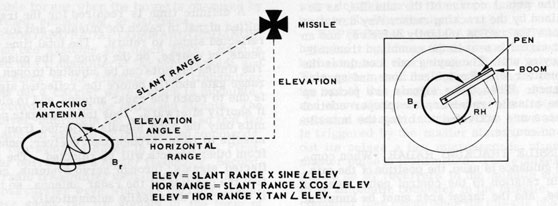
MISSILE PLOTTING SYSTEM. The use of radar for missile tracking makes it possible to obtain information on the missile's elevation, bearing, and horizontal range. This information may be plotted so that personnel controlling the missile will have a complete picture of the operation.
An example of a basic plotting system is shown in figure 7B1. The tracking radar is shown at the left of the drawing, and the plotting board at the right. The boom on the
132
Figure 7B1.-A basic plotting system.
plotting board revolves around a center pivot, and is positioned by the missile bearing data. The tracing pen trolley (mounted on the revolving boom) is positioned by the horizontal range data. The pivot of the boom represents the tracking radar location, and the pen position represents the instantaneous location of the missile.
The radar can provide only slant range, bearing, and elevation angle. The horizontal range data used to position the tracing pen trolley can be obtained from the product of the slant range and the cosine of the elevation angle. The elevation of the missile is the product of the slant range and the sine of the elevation angle (or of the horizontal range and the tangent of the elevation angle). Successive positions of the missile can be marked on the plotting chart at regular intervals, to provide an indication of the missile's course.
COMMAND TRANSMITTER. The transmitter used to send commands to the missile is usually a tone-modulated FM unit. This type of transmitter was discussed earlier in this chapter.
7B5. Missile components
The command guidance equipment components that are built into the missile will be determined by the guidance system being used. The most complex guidance system has a television camera, television transmitter, radio command receiver, and the tone filter equipment built into the missile.
A relatively simple guidance system, so far as total equipment in the missile is concerned,
is based on a radar transmitter that sends guidance commands to the missile on the tracking radar beam. With this system, only a receiver for the radar pulses is needed in the missile. The output of the receiver controls activating circuits that function when pulses of the correct amplitude and sequence are received.
The most widely used command guidance system uses a radar tracking unit and a radio command link. The missile contains an FM receiver and AF channel selectors.
7B6. Operation of a typical system
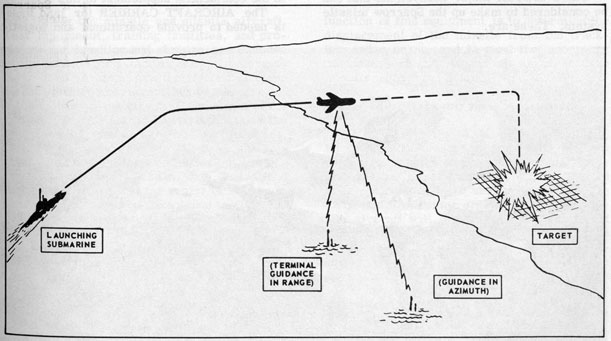
A typical command guidance system might be used to control a surface-to-surface missile fired by a ship against a fixed installation ashore. The missile, during the early part of its flight, would be tracked by radar aboard the firing vessel. Because the geographical location of the target and the firing vessel are both known, the required missile course can be accurately calculated. Information from the missile-tracking radar may be fed to a computer, or it may be plotted on a visual display, or both. When the tracking data indicates that the missile has turned from its calculated course, commands can be transmitted to turn it back.
If the target is at fairly short range, the firing vessel may control the missile throughout its entire flight. At longer ranges, the tracking and command functions may be transferred to an aircraft, or they may be transferred successively to one or more ships located nearer to the target.
133
C. Radar Command System
7C1. General
There is great similarity between radio and radar command guidance systems. However, there are some differences which must be considered when a guidance system is being designed.
Most radar command guidance systems depend on "sampling" control, since it is not possible to control all of the missile functions at once. Each must take its turn in the control sequence. Consequently, after a given function has received a command, there will be a time delay before the next command is received. The length of this delay will depend on the number of functions to be controlled.
When radar is used for control, the fidelity or accuracy of control is limited by the allowable variations in pulse rate or amplitude. (Excessive variations will affect the tracking accuracy.) The accuracy of control is also limited by the ability of the missile equipment to measure these variations accurately.
There are several ways in which commands can be sent by radar. For example, the pulse repetition rate (PRR) of the radar may be frequency modulated in order to turn the missile in the desired direction. If the PRR is unmodulated, no control signal is sent to the missile. If the PRR is modulated so that it increases, the missile will turn in a certain direction; if the PRR decreases, the missile will turn in the opposite direction. Since the PRR can be varied by the modulation frequency, it is possible to make the amount of turn proportional to the deviation from the normal PRR, and thus obtain accurate control.
This system requires some form of multiplexing or switching control, so that operations take place in a definite sequence. As an example, there may be five possible operations and each may be controlled by a 1/100-second signal of the proper pulse rate. A complete set of control signals could then be sent every 1/20 second.
The control pulses may be coded in sequence so that each pulse controls a particular operation. As soon as a full set of operations is covered, the sequence starts over again. The pulses may be modulated either in amplitude or by their position on a time scale.
Other methods by which the control signal may be sent to the missile via the radar tracking beam are:
1. Dual pulses are sent, and the spacing between pulses is varied according to the desired control signal. Or single pulses are transmitted, and when a particular control signal is desired, double, triple, or quadruple pulses are sent.
2. Alternate pulses may be displaced ahead of or behind their normal position and the desired control signal is determined by the amount and direction of the displacement. This is known as the displaced-pulse method of control.
3. By varying the width of the radar pulse, each control signal may be determined by the pulse width.
4. The radar pulse may be amplitude modulated so that the frequency of the modulated pulse envelope will determine the control signal.
5. The pulse rate may be varied indiscrete steps, with each frequency representing a different operation, such as climb or dive, right or left, explode, or dump. The degree of any operation, such as the amount or rate of climb, may be determined by the number of repetitions of the signal or the length of time a particular signal is maintained.
The use of the tracking radar beam as a control medium results in economy of equipment, because the radio control transmitter is no longer needed.
As in any other communications equipment, the bandwidth of the modulated signal determines the amount of information that can be transmitted in a given time. A radar signal with a pulse repetition rate of two thousand cycles per second would limit the number of functions that could be controlled, as well as the rate at which the control signals could be changed. But for some missile systems this bandwith is adequate, because only a few missile functions are under control by command guidance. And, if the rate of signal change is not too great, there will be enough bandwidth to allow modulation of the radar beam with several signals simultaneously.
If there are missiles in the vicinity of the beam other than the one being tracked, there
134
must be some coding or frequency discrimation method used, so that each missile will respond only to its own control signals. Therefore, if there is any likelihood that the spacing between radar beams is not sufficient, each missile launched from a particular control station must have either special coding equipment or at least a special receiver adjustment to ensure response to the correct signal.
Although the useful types of modulation are limited when radar is used for missile control, the susceptibility of the system to jamming is greatly reduced by the use of the narrow beam. In this respect the radar system is slightly superior to radio control, especially when the radar pulses are sent in a coded sequence. But radio is superior for sending commands to the missile, since by using tone modulation it is possible to activate several circuits at the same time.
D. Long-Range Hyperbolic Guidance
7D1. Loran principle
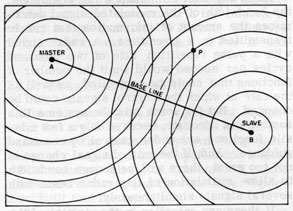
Standard Loran was developed primarily for long range navigation over water. The system requires at least two transmitting stations-one a MASTER, the other a SLAVE. The stations are separated by a distance of several miles, and the geographic location of each station is accurately known.
The master station transmits a signal which is radiated in a circular pattern. When the signal reaches the slave station, or stations, it triggers the slave which then sends out a pulse that is also radiated in a circular pattern. The signals of all stations travel outward from their respective antennas as shown in figure 7D1. At any point, such as P in figure 7D1, the signals will have different times of arrival because of the distances traveled and the differences in transmitting time.
Figure 7D1.-Basic Loran system.
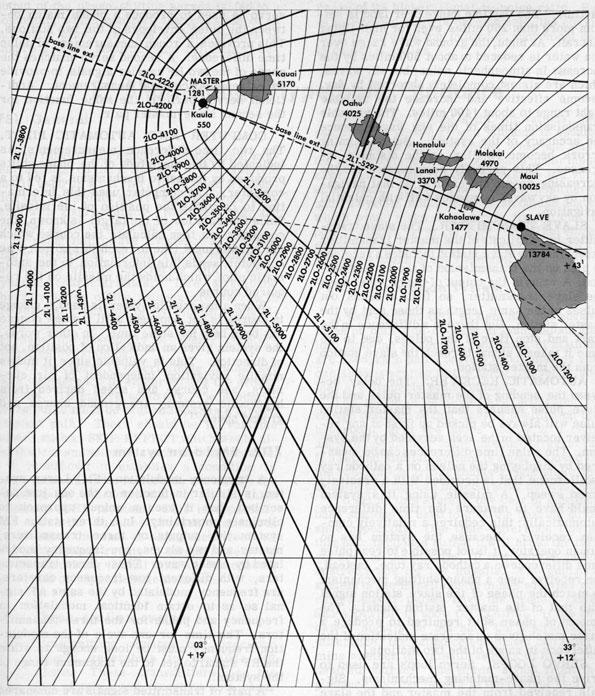
The difference in the range from master to P and slave to P, figure 7D1, can be determined mined by measuring the difference in time of arrival of the two signals. A set of points for which this difference is constant can be connected together to form one line of a surface called a HYPERBOLOID OF REVOLUTION. Points for different values of constant range difference can be determined and connected together. The curves that result form a family of hyperbolas as shown in figure 7D2.
Any plane passing through the line A-B, in figure 7D1, intersects these hyperboloids in such a manner that, in this plane, there passes only one branch of a hyperbola that is characterized by a constant range difference. Thus, if the range difference is known, a hyperbolic line of position on that plane is defined.
If a second line of position from another pair of Loran stations is known, a fix in the plane is determined by the intersection of the two hyperbolas.
Charts are available that show the hyperbolic lines of position associated with pairs of Loran stations in various areas. By using these charts, a navigator, knowing the range difference by radio measurement, can select his lines of position to get a fix.
Some work has been done toward the use of hyperbolic lines of position for missile command guidance. Therefore the basic parts of such a system will be briefly described.
MASTER TRANSMITTER. The master transmitter is a conventional CW transmitter radiating about 100 kw of power on one of several frequencies between 1700 and 2000 kc. The output is a series of pulses of accurately timed length. The ground wave range over sea water is about 700 nautical miles in the
135
Figure 7D2.-Hyperbolic curve family.
136
daytime. The daytime range over land is seldom more than 250 miles even for high-flying aircraft. At night, the ground wave range over sea water is reduced to about 500 miles by the increase in atmospheric noise; but sky waves, which are almost completely absorbed by day, become effective and increase the reliable night range to about 1400 miles. The variable transmission times of the sky waves reduce the accuracy of the system. But the timing errors become smaller as the distance increases. This partially compensates for the increasing geometric errors, so that navigation by skywaves compares well with celestial navigation.
SLAVE TRANSMITTER. The slave transmitter is a duplicate of the master transmitter except that the slave station includes a receiver to pick up the transmission of the master station. A relay in the output of the receiver keys the slave transmitter, so that it sends out pulses of the same length as those sent by the master station. But there is a difference in the start and stop time of the pulses, due to the time it takes a signal to reach the slave station from the master station.
AUTOMATIC RECEIVER. The delay between the sending of the master pulse and the slave pulse ensures that the master station pulse will always be picked up first at any receiver located in the area serviced by the system. The pulse time differences can be measured by displaying the pulses on a cathode ray oscilloscope that is provided with a precisely timed sweep. A missile using this system would have to measure the time difference automatically; this requires a relatively complex receiver. Because the system has no human operator, it is not possible to read pulse time difference on a cathode ray tube. Instead, the receiver uses a phase-shifting mechanism to match the phase of the slave station signal with that of the master station signal. The amount of phase shift required to produce a phase match gives an accurate indication of the difference in range of the two stations.
SERVO LOOPS. Servo loops are used to drive the phase-matching mechanisms. Signals received from the master and the slave stations are sent to a mixer; when the two are exactly in phase, the mixer output will be at a maximum. The mixer output is used to drive the phase-shifting servos in the direction required to produce a maximum output. One
servo is used to produce a phase match between the pulse envelopes of the two stations. This provides a rough measurement of pulse time difference. A second servo matches the phase of the two RF carrier signals, to provide an extremely accurate measurement. Additional servos perform the same function for the second slave-master pair.
COMPUTER AND AUTOMATIC PILOT. The two time-difference measurements, as indicated by the magnitude of the phase shifts produced by the servo mechanisms, is fed to a computer. The computer uses this information to calculate the position of the missile. Since the position of the target is known, the computer can then calculate the course which the missile must take to reach this target. The computer sends this information to the automatic pilot, which holds the missile on the required course.
When a hyperbolic system is used, a change in course is not apparent until the new course has been held for some time. In other words, the system gives an indication of position, not of direction. This is valuable since it makes missile navigation independent of air currents, and course and speed derived from hyperbolic systems are ground course and ground speed.
7D2. FM Loran system
A frequency-modulation (FM) Loran system is similar in function to the one just described, but it uses a unique approach to eliminate uncertainty. In a three-station FM system the outputs of three transmitters, master and two slaves, are frequency modulated by a sine wave. These three transmitters, with different low-frequency carriers, are frequency modulated by the same AF signal so as to obtain identical modulation in frequency and phase for the three transmitters. The time for one cycle of the modulation frequency must be long enough to allow the RF signal to get to the maximum range of the system.
A pair of transmitted signals are compared by measuring the relative delay required to produce a phase match in their modulating signals. Phase matching is indicated by an output of maximum amplitude from the mixer. As in the system previously described, the
137
output of the phase-shifting servos is fed to a computer, which controls the operation of an automatic pilot. The FM system appears to ensure greater accuracy and reliability,
because of its higher signal-to-noise ratio. But in its present state of development, the equipment required is too bulky for convenient use in guided missiles.
E. Short-Range Hyperbolic Guidance
7E1. General
The range of any hyperbolic navigation system depends on the frequency of the radiation that is used as a carrier. Ultra-high frequencies can be used for short range guidance systems with good accuracy. However, they are not good at the longer ranges.
By using microwave frequencies, a small, highly directional antenna can be mounted on the missile without interfering with its aerodynamic characteristics. The directional characteristics of the antenna are narrow in the vertical plane and fairly wide in the horizontal plane. These directional characteristics decrease the possibility of enemy countermeasures by jamming.
It is necessary to discriminate against sky wave interference in synchronizing the ground stations. To ensure accuracy, the synchronizing pulse must be transmitted via a direct, constant path. There should be no variable factors such as SKIP EFFECT which would alter the transmission of synchronizing signals.
It is difficult to establish a condition in which these variable factors do not change the transmission characteristics of an ultrahigh frequency (UHF) system. This is especially true where the baseline between stations is longer than the line-of-sight distance. All UHF installations require a means of relaying the synchronizing signal without introducing variations or unpredictable delays.
7E2. Three-station system
The transmitting stations use precision timing signal generators to modulate RF transmitters. These transmitters use the same kind of tubes and circuitry as a radar transmitter operating in the same frequency range. They must have high power output to give a high signal-to-noise ratio near the limit of their effective range. For UHF, this is normally assumed to be line-of-sight.
Because of line-of-sight limitations, the separation between ground stations is usually limited to less than 100 miles. When one master and two slave stations are used under these conditions, the short baseline results in a very short useful range. The lines of position in such a system would cross at an obtuse angle, which would make an accurate fix difficult at points distant from the baseline. Therefore, three-station systems have been modified to overcome some of the limitations.
7E3. Four-station system
A four-station UHF system has the advantages of both line-of-sight transmissions and long baseline systems. Two pairs of stations are used; each pair consists of one master and one slave operating on the same frequency, and they are properly synchronized.
The pairs of stations are separated by enough distance so that lines of position on the hyperbolic grid are more nearly at a right angle to one another in the intended target area. If a second similar system is superimposed on the two-station grid at nearly aright angle, the missile position can be accurately determined.
To set up this system, one pair of guidance base stations is used to give the bearing guidance hyperbola. One time-difference line of this pair is chosen so that it will cross the target area of the missile. It then serves as the desired track for the missile. The guidance system in the missile determines when the received signal pulses have the proper TIME SEPARATION to show ON COURSE. If the received signals do not have the desired time difference, the guidance equipment can determine whether the missile is right or left of the desired course. The error signal from the guidance section is sent to the control section which makes the corrections to bring the missile on course.
The second pair of guidance base stations is used to determine the range. A particular time-difference line of this system is calculated
515354 O-59-10
138
to pass through the correct point for starting the terminal phase of the flight. The intersection of this RANGE LINE and the COURSE LINE gives a fix at the pre-dump point. To do this, the missile guidance equipment develops a voltage (from the base guidance signal) that is proportional to the distance from the preselected target location. This varying output voltage approaches zero at a rate which is proportional to the velocity of the missile.
This output voltage is converted to another voltage which is proportional to the rate of change of the output voltage. This proportional
voltage is then a measure of the missile ground speed. It is necessary to compensate for expansion of the hyperbolas as the distance from the transmitter increases. The determination of ground speed is necessary so that the missile does not overshoot or undershoot the target due to a change in air speed from the expected value.
It should be kept in mind that command guidance systems are in a state of constant development, and that future systems may differ considerably from those described here.
139
CHAPTER 8 BEAM-RIDER GUIDANCE
A. Introduction
8A1. General
The previous chapter discussed various methods by which commands can be sent from a control point to a missile, to control the missile flight from launching point to target. Beam-rider guidance system is in some respects similar to command guidance. In both systems, target information is collected and analyzed by suitable devices at the launching site or other control point-rather than by devices within the missile. In both systems, the missile makes use of guidance signals transmitted from the control point.
But beam riding is not considered a form of command guidance. The principal difference is this: in a command system, guidance signals are specific commands, such as "steer right," or "steer left." But the transmitter of a beam-rider guidance system transmits only information, not commands. By projecting a narrow beam of radar energy, the transmitter at the control station indicates the direction of the target (or, in some systems, the direction of a calculated point of intercept). The guidance system within the missile must interpret the information contained in the radar beam, and then formulate its own steering commands. These commands operate to keep the missile as nearly as possible in the center
of the beam. The missile can thus be said to "ride" the beam to its target.
The beam-rider system is highly effective for use with short-range and medium-range surface-to-air and air-to-air missiles. For missiles of longer range, a beam-riding system may be used during the midcourse phase of flight, while the missile is still within effective range of the beam-transmitting radar. As it approaches the limit of beam-riding range, the missile may switch over to some other form of guidance.
8A2. Application to U.S. Navy missiles
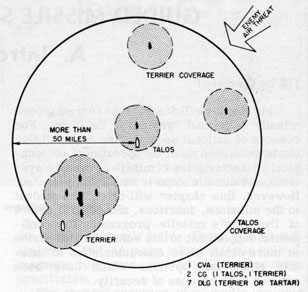
The development of missile guidance systems with minimum susceptibility to enemy countermeasures, and with maximum probability of hitting the target, is the primary objective of the U. S. Navy missile program. The program is continuous and has a high priority rating. Two missiles, Terrior and Talos, developed under this program have been operational for some time. Both of these are surface-to-air missiles using beam-rider guidance. This chapter will give information of a general nature on guidance systems that might be used with missiles of this type. It should be kept in mind that security requirements prevent a detailed description of the guidance system of any specific missile.
B. Guidance Antennas
8B1. General
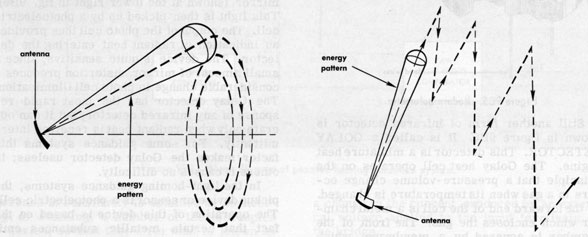
The radar energy that forms the guidance beam is transmitted by an antenna at the control point. Radiated energy tends to spread out equally in all directions. But by mounting a suitable reflector behind the antenna, a large part of the radiated energy can be formed into a relatively narrow beam. A narrow beam can point out the target direction with sufficient accuracy for the missile to score a hit, and concentration of the radiated energy into a beam extends the effective range of the system.
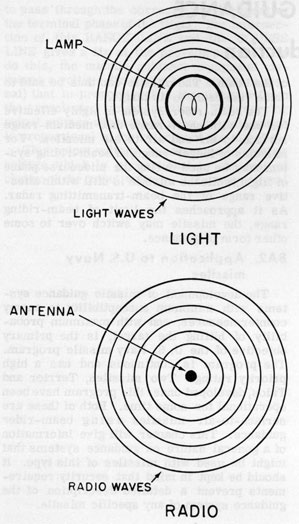
Figure 8B1 compares the radiation from a radio antenna with that from a lamp. Both light waves and radio waves are electromagnetic radiation; the two are believed to be identical, except in frequency of vibration. From both sources, energy spreads out in the form of spherical waves. Unless they meet some obstruction, these waves will travel outward indefinitely at the speed of light. Because of its much higher frequency, light has a much shorter wavelength than radio waves. This is suggested in figure 8B1, but it cannot be shown accurately to scale. The wavelength of radar transmission may be measured in
140
Figure 8B1.-Comparison of radiation from a lamp and a radio antenna.
centimeters; the wavelength of light ranges from about three to seven ten-thousandths of a millimeter.
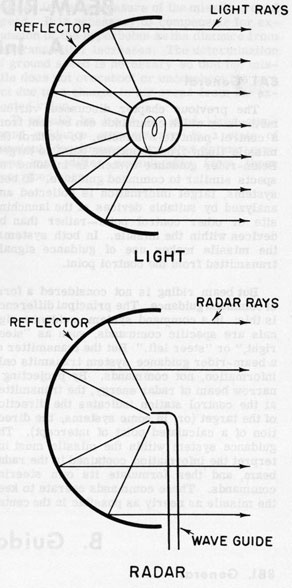
You are, of course, familiar with the use of polished reflectors to form beams of light. An automobile headlight is an example of this, although it produces a fairly wide beam. A spotlight produces a more narrow beam. The upper part of figure 8B2 represents the reflection of light by an "ideal" reflector. The emerging rays are parallel; the beam is no wider than the reflector itself, and it does not diverge. But an ideal reflector is hard to
Figure 8B2.-Use of reflectors to form beams of radiant energy.
achieve in practice. It must be a paraboloid of revolution-that is, the surface generated by a parabola rotated on its axis. It must be highly polished; its surface irregularities must be small compared with the wavelength of light. And the light source must be a single point, located at the focus of the paraboloid.
The lower part of figure 8B2 represents the reflection of radar waves. Again, the surface
141
of the reflector is a paraboloid. But it need not be highly polished, because of the longer wavelength of radar. The source of radiation is the end of a waveguide. Unfortunately, this is not a point source; it must have a finite area.
It should be noted that a light RAY is simply a convention used in diagrams of optical instruments. Such rays do not exist in nature. They are imaginary lines that indicate the direction in which the wavefronts are moving. Although RADAR RAYS are not a familiar convention, they are used in figure 8B2 to show the direction in which the radar waves are moving.
Of course the lamp shown in figure 8B2 is radiating light in all directions. The light from the front surface, which does not strike the reflector, will be scattered widely. In some spotlights, the front surface of the lamp is shielded, so that the only rays that leave the spotlight are those that have been reflected. Such a spotlight produces a sharply defined beam, with little or no scattered light. The same effect is achieved in radar by directing the opening of the waveguide backward, toward the reflector.
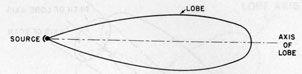
But no radar can produce an ideal beam of parallel "rays." For one thing, the end of the waveguide is large, compared to the ideal point source. For another, a reflector of practical size is not sufficiently large compared with the wavelength of the radiated energy. A radar beam therefore diverges and forms a lobe, like the one in figure 8B3. The student should clearly understand that such a lobe is merely a convenient way of representing the beam on paper; it is in no sense a "picture" of the beam. Some of the radiated energy will be scattered outside the lobe. And the radiation does not end abruptly at a certain distance from the transmitter, as the diagram implies. The lobe, if it can be pictured in three dimensions, can be thought of as a surface, all parts of which receive an equal amount of energy. This can be considered the minimum energy that is useful for our purpose (missile guidance or target tracking). And the lobe in figure 8B3 is not drawn to scale. The diameter of the reflector is in the order of two feet; the length of the lobe may be from 20 to 50 miles. Its useful width may be four or five degrees. At any given distance from the transmitter, the signal is strongest along the axis of the lobe.
Figure 8B3.-How r-f energy is concentrated in a lobe.
8B2. Conical scanning
In a beam-rider guidance system, radar must accomplish two things; it must track the target, and it must guide the missile. It would be difficult to do either of these things with a simple lobe like the one in figure 8B3. For example, assume that a target is somewhere on the lobe axis, and that the receiver is detecting signals reflected from the target. If these reflected signals decrease in strength, it will be apparent that the target has flown off the axis, and that the beam must be moved to continue tracking. The beam might be moved by an operator who is tracking the target with an optical sight; but such tracking would be slow and inaccurate, and would be limited by conditions of visibility. An automatic tracking system requires that the beam SCAN, or search, the target area.
Again, assume that a missile is riding the axis of a simple beam. The strength of the signals it receives will gradually decrease as its distance from the transmitter increases. If the signal strength decreases suddenly, the missile will know that it is no longer on the axis of the lobe. But it will NOT know which way to turn to get back on the axis. A simple beam does not contain enough information for missile guidance.
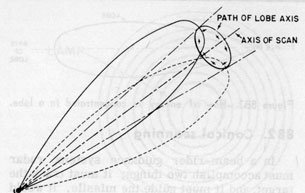
By a suitable movement of either the wave-guide or the antenna it is possible to generate a conical scan pattern, as shown in figure 8B4. The axis of the radar lobe is made to sweep out a cone in space; the apex of this cone is, of course, at the transmitter. At any given distance from the transmitter, the path of the lobe axis is a circle. Within the useful range of the beam, the inner edge of the lobe at all times overlaps the axis of scan.
Now assume that we use a conically scanned beam for target tracking. If the target is on the scan axis, the strength of the reflected signals will remain constant (or change gradually as the range changes). But if the target is slightly off the axis, the amplitude of the
142
Figure 8B4.-Conical scanning pattern.
reflected signals will change rapidly and periodically. For example, if the target is ABOVE the scan axis, the reflected signals will be of
maximum strength as the lobe sweeps through the highest part of its cone; they will quickly decrease to a minimum as the lobe sweeps through the lowest part. Information on the instantaneous position of the beam relative to the scan axis, and on the strength of the reflected signals, can be fed to a computer. If the target moves off the scan axis, the computer will instantly determine the direction and amount of antenna movement required to continue tracking. The computer output can be used to control servo mechanisms that move the antenna, so that the target will be tracked accurately and automatically.
When a conically scanned radar beam is used for missile guidance, the desired path of the missile is not along the axis of the beam, but along the axis of scan. Later in this chapter, we will show how the missile is able to guide itself along this axis.
C. Principles of Beam-Rider Guidance
8C1. General
Two types of beam-rider system are possible. In the simplest type, a single radar is used for both target tracking and missile guidance. In the other, one radar is used for tracking, while another generates the guidance beam. We will discuss the one-radar system, then point out briefly how the two-radar system differs.
8C2. One-radar system
In a one-radar system, the guidance beam is always pointed directly at the target, since the same beam is used for tracking. Two or more missiles can be in flight at the same time (toward the same target). The traffic handling capacity of the system is limited only by mutual interference between missiles in the beam. Once a missile has entered the beam path, no further operations are necessary at the launching site, except to maintain target tracking.
One factor must always be considered when an offensive weapon is used. That is, the enemy will always try to find countermeasures that will enable him to offset, or completely nullify, the effectiveness of the weapon. Some attempted countermeasures are fairly easy to overcome; others may be highly effective.
Since radar is used as a guidance control, the system is subject to any form of countermeasure that will interfere with the radar beam. The interference may take the form of small sheets of metal foil, called "window," dropped by the target to give false information to the tracking radar. The radar might, under some conditions, be led to track the foil sheets rather than the target.
Another form of countermeasure might be an enemy radar set working on the same frequency as the guidance radar. This type of interference is called "jamming." The nature of the beam-rider guidance system gives good anti-jamming characteristics because the beam is narrow and directional. The missile carries its receiving antennas on its after end-often on its rear airfoils. These antennas are also directional; they are most sensitive to signals originating behind the missile, and relatively insensitive to signals originating in front. To effectively jam the guidance beam, the jamming transmitter must get behind the missile. Thus a jamming transmitter would be of little value as a defensive measure for a target aircraft, because once the target gets behind a given missile, it has already successfully evaded that missile.
It is also possible to transmit the guidance beam as a series of pulses having a definite,
143
coded sequence and amplitude. The missile can be set to accept guidance signals only if they follow the proper coded sequence, and to reject all other signals. By using a variety of code sequences, and by changing them often, it is possible to make successful jamming very unlikely.
Beam-rider guidance is used by both air-to-air and surface-to-air missiles. In neither application is the missile actually in the guidance beam at the instant of launching, and the problem of getting it there must be solved. For air-launched missiles, this is relatively easy; the missiles are carried beneath the wings of the aircraft, fairly close to the guidance radar. And they are fired directly forward; in most situations this is toward the target, and thus parallel to the guidance beam.
But when a surface-to-air missile is launched from the deck of a ship, the "capture" problem is more complex. The missile may be trained at almost any angle (except into the ship's structure). Because the blast of hot gases from the missile booster is deflected along the deck at the time of launching, a large area around the launcher must be kept clear. The guidance radar must therefore be located at some distance from the launcher. The missile cannot be launched directly toward the target, on a course parallel with the guidance beam. Instead, it must be launched in such a direction that it will CROSS the guidance beam a few seconds after launching. It will then turn toward the target, after it has been captured by the beam.
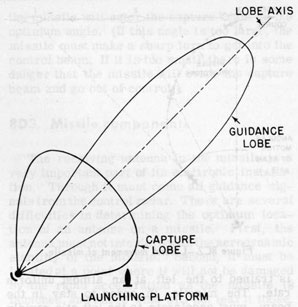
But because the guidance beam is narrow, merely aiming the missile to cross it is not enough to ensure capture. To make capture more certain, a broad CAPTURE BEAM (fig. 8C1) is superimposed on the narrow guidance beam. Because the energy in the capture beam is spread out over a large area, its effective range is short.
During the launching phase of missile flight, the control surfaces are locked and the guidance system is inoperative. The booster propels the missile in a direction calculated to place it within the capture beam. When the booster drops away, the control surfaces are unlocked and the guidance system takes over. The missile receiver is tuned to respond to the capture beam, and to seek its axis. In so doing, it turns itself toward the target and aligns itself in the guidance beam, which has
Figure 8C1.-Capture beam and guidance beam.
the same scan axis as the capture beam. After a preset interval, a timing device within the missile changes the receiver tuning. The missile will then reject signals from the capture beam, and respond only to those in the guidance beam, which has a different carrier frequency.
The single-radar beam-rider system, because it uses only one radar instead of two, has the advantage of simplicity. But the use of a single radar results in a serious problem. Remember that the guidance beam is also the tracking beam, and must therefore be pointed at the target throughout the missile flight. Except in one special case-when the target is flying directly toward the transmitter-the radar must be trained in order to follow the target. For a nearby, high-speed, crossing target, the angular rate of train will be high. The missile course, therefore, cannot be a straight line. The missile must constantly move sideways in order to stay in the beam. While the missile is relatively close to the transmitter, its lateral rate is small. But, as the missile approaches the target, the same angular rate of train will require increasing lateral acceleration of the missile.
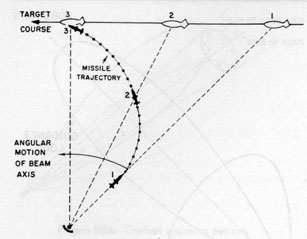
Figure 8C2 illustrates this problem by showing three successive positions of the target and the missile. In this example, the beam
144
Figure 8C2.-Lateral movement of missile.
is trained to the left at an almost uniform rate. The missile, in order to stay in the beam, must accelerate to the left at a rapidly increasing rate. In the extreme case shown in the figure, the missile as it nears the target, must follow a path almost at a right angle to the beam. Even with its control surfaces in their extreme positions, the missile would probably be unable to turn at the required rate. Thus a one-radar beam rider might be useful against approaching targets, but ineffective against high-speed crossing targets.
8C3. Two-radar system
The two-radar beam-riding system uses one radar to track the target and a second radar to guide the missile. A computer is used between the two, and the guidance radar is controlled by the computer. The computing system uses information from the tracking radar to determine the trajectory necessary to ensure a collision between the missile and the target. Because the same radar beam is no longer used for both tracking and guidance, the missile need not follow a line-of-sight path, as was the case with a one-radar system.
The same countermeasures which would affect a one-radar system could be used against the two-radar system. But it would be more difficult to destroy control effectiveness, because of the two radar beams and the computer action. The computer stores guidance information as it determines the trajectory the missile is to follow. Therefore even if the tracking beam were interrupted by countermeasures for a short time, the computer would still be able to maintain the guidance beam, and hold the missile on a probable collision course with the target.
The two-radar beam-guidance system is more complex insofar as ground equipment is concerned, because of the addition of a computer and a second radar. The equipment in the missile is the same for either system.
From the information that has been given, it may be seen that the computer is an important part of a two-radar guidance system. The computer takes information-speed, range, and course-from the tracking radar. From this information, it computes the course that must be followed by the missile. Since the computer receives information constantly, it can and does alter the missile course as necessary to offset evasive action or changes in course by the target. The output of the computer controls the direction of the guidance radar antenna. Required course changes are instantly transmitted to the missile by pointing the guidance beam toward the new point of intercept.
As we mentioned earlier, lateral acceleration presents a serious problem when a one-radar guidance system is used, because the missile course is changed by the angular movement of the tracking beam. This problem is not present in a two-radar guidance system because the missile course is directed toward a collision point, rather than toward the constantly changing position of the target. Because course information is continuously fed to the missile guidance radar, the missile trajectory is straight or only slightly curved from the launching point to the target.
D. System Components
8D1. General
There are several important components, other than the missile and radar, in a complete
guided missile system. As explained earlier in this text, a major part of the equipment is at the launching site. We will describe individual components that might be found in a
145
complete system. Keep in mind that the number and type of components will vary with individual systems, and that a mobile setup will differ from a fixed, permanent launching site.
8D2. Launching station components
The target is usually picked up at long range by a search radar. When the target is identified, the tracking radar takes over the job of following it, and determines its direction, speed, and range. This information is converted rapidly into useable form by the computer.
Because the computer is given the course, speed, bearing, elevation, and instantaneous range of the target, it can calculate the position of the target at any future time, assuming that it does not change course or speed. The computer is also given the average speed of the missile. With this information, it is able to determine the direction in which the missile must be launched to intercept the target. It is unlikely that a missile will be fired as soon as the tracking radar acquires the target. The target range is constantly changing, and the target may change course or speed as well. The computer must therefore produce a continuous solution to a continuously changing problem. At any given instant, the computer output provides the correct solution to the problem as it exists at that instant.
In a two-radar system, the computer continues to calculate the missile course after the missile has been launched, and until the target has been destroyed. Through servo mechanisms, it turns the control radar in the proper direction. In a one-radar system, the computer output is used to train and elevate the missile launchers in such a direction that
the missile will enter the capture beam at the optimum angle. (If this angle is too large, the missile must make a sharp turn to get into the control beam. If it is too small, there is some danger that the missile will evade the capture beam and go out of control.)
8D3. Missile components
The receiving antenna in the missile is a very important part of its electronic installation. Through it must come all guidance signals from the control radar. There are several difficulties in determining the optimum location of an antenna on a missile. First, the antenna must not interfere with the aerodynamic stability of the missile. Second, it must be located at a point where it will not be damaged by the rapid acceleration as the missile is launched, and where wind will not tear it loose. Finally, the antenna must be located where it can effectively pick up the signals of the guidance beam. The antenna location that has been found most satisfactory is on the missile tail surfaces.
The missile antenna is highly directional, and most sensitive to signals received from behind the missile. The roll-control system of the missile keeps it stabilized so that the antenna polarization remains constant.
The guidance signals picked up by the missile antenna are fed to a receiver. After the signals are amplified and demodulated by the receiver, they are fed to a computer. If the missile is off the scan axis of the guidance beam, the computer will determine both the direction and the magnitude of the error. It will then give the control system the commands required to bring the missile back onto the scan axis.
E. System Operation
8E1. General
Earlier sections of this chapter have shown that a number of components are required to complete a beam guidance system. Each component must function properly if the missile is to destroy the target. But no system can be expected to operate beyond its natural limitations.
One of the factors limiting the effective range of radar is the curvature of the earth. The effective range of a radar beam can be expressed in terms of transmitting and receiving antenna heights above the earth's surface. The formula is
RE = sqrt(2Ht) + sqrt(V2Hr)
146
where Ht and Hr are the heights of the transmitter and receiver antennas in feet, and RE is the effective range in miles.
It can be seen that raising the height of either antenna will increase the effective range. Thus it appears that a missile, because of the altitude at which it travels, can be controlled at extremely long range. But this is not true. The transmitter power necessary to deliver a satisfactory control signal increases rapidly with distance. Therefore, for long range missiles, a single beam-rider guidance system would be unsatisfactory. But these limitations can be overcome by using beam-rider guidance during the first part of the missile flight, then switching to a different guidance system before the missile flies beyond control of the radar beam.
8E2. Tracking radar
We have mentioned that the tracking radar furnishes information as to the position of the target. All target position references are made with respect to the scan axis of the tracking lobe.
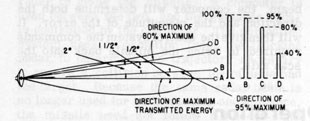
The amount of energy in the beam falls off rapidly at points away from the center of the lobe. Figure 8E1 shows the relative amounts of energy transmitted at various angles to one side of the lobe axis. Because of the variation in transmitted energy, there will be a corresponding variation in the strength of signals reflected by targets at various angular distances from the center of the lobe.
Figure 8E1.-Radiated energy variation.
As we mentioned earlier, the tracking system is automatic. After the tracking radar has acquired the target, tracking is maintained without the help of a human operator. But the action of the tracking system is monitored by an observer, who may take over and track the target manually if the automatic system fails.
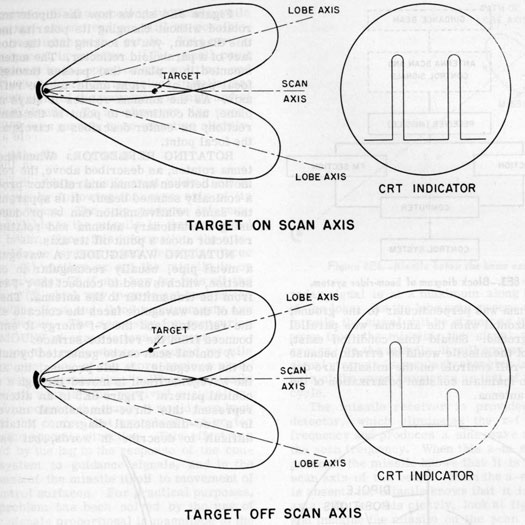
At the monitor station, indications of target position relative to the scan axis of the tracking beam are presented on two cathode-ray tubes (CRT's). Figure 8E2 shows how the vertical position of the target, relative to the scan axis, is presented on a CRT. In the upper part of the figure, the target is on the scan axis. Remember that the tracking lobe is scanning a conical pattern in space. The lobe is shown in the highest and the lowest positions of its scan pattern. For each of these two positions, the CRT produces a pip, the height of which is proportional to the strength of the reflected signal. Since the two pips are of equal height, they indicate that the reflected signals are of equal strength when the lobe is in its highest and lowest positions. This can occur only when the target is vertically centered with respect to the two lobes--that is, in a transverse plane through the axis of scan.
The lower diagram shows the effect of a target above the scan axis of the beam. When the lobe is in its highest position, the target is directly on the lobe axis, and the height of the CRT pip is a maximum. When the lobe is in its lowest position the target is far off the lobe axis; its reflected signal will be much weaker, and the pip on the CRT correspondingly small. This indicates that the target is above the scan axis.
A second CRT indicates the relative strength of the reflected signals when the lobe is at its extreme left and extreme right positions. In an emergency, the operator can track the target manually by moving the radar so as to keep the pairs of pips of equal height on both CRT's.
8E3. Control radar
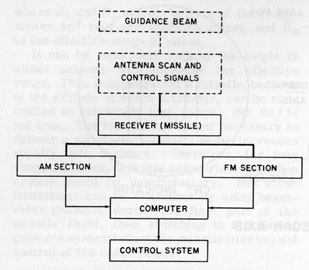
A block diagram showing the sections of a beam-rider guidance system is shown in figure 8E3. The guidance beam pattern is formed by the antenna of the guidance radar. Transmitter sections are shown in the dashed squares of figure 8E3. The sections in solid lines are in the missile.
As explained earlier, a conical scan is one in which the lobe axis of the radar beam is moved so as to generate a cone. The vertex of this cone is at the antenna. It is possible to produce a conical scan by any of several methods.
147
Figure 8E2.-How CRT indicates target position in relation to the scan axis.
ROTATING DIPOLE. A dipole antenna consists of two wires or rods mounted end-to-end. R-f energy is fed into the center of the antenna, with the two poles receiving signals of opposite phase. The overall length of the antenna is half a wavelength.
The proper length for a dipole IN FREE SPACE can be determined from the formula:
Length (feet) = 492 / Frequency(mcs)
However, free space conditions do not exist in actual antenna installations, and the most
efficient length for a half-wave antenna is usually about 95 percent of that given by the formula.
The formula shows that a dipole antenna for 450 mcs would be about 13 inches long. Therefore, the physical size of a highly directional array (antenna and reflector) for that frequency would be small enough for easy mounting and rotation.
When we speak of rotating a dipole, we do not mean that the antenna is turned or rotated about its center. If this were done, the antenna polarization would change as the antenna turned. Polarization would be vertical when
148
Figure 8E3.-Block diagram of beam-rider system.
the antenna was perpendicular to the ground, and horizontal when the antenna was parallel to the ground. Should this condition exist, control of the missile would be erratic because the anti-roll controls on the missile are designed to maintain constant polarization of the missile antenna.
Figure 8E4.-How a dipole is rotated.
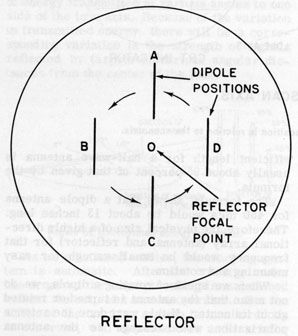
Figure 8E4 shows how the dipole may be rotated without changing its polarization. In this diagram, you're looking into the concave face of a paraboloid reflector. The antenna is mounted in a plane that passes through the focal point at a right angle to the reflector axis. As the antenna rotates it stays in this plane, and continues to point in the same direction; its center describes a circle around the focal point.
ROTATING REFLECTOR. When the antenna rotates, as described above, the relative motion between antenna and reflector produces a conically scanned beam. It is apparent that the same relative motion can be produced by using a stationary antenna and rotating the reflector about a point off its axis.
NUTATING WAVEGUIDE. A waveguide is a metal pipe, usually rectangular in cross- section, which is used to conduct the r-f energy from the transmitter to the antenna. The open end of the waveguide faces the concave side of the reflector, and the r-f energy it emits is bounced from the reflector surface.
A conical scan can be generated by nutation of the waveguide. In this process, the axis of the waveguide itself is moved through a small conical pattern. Figure 8E5 is an attempt to represent this three-dimensional movement in a two-dimensional diagram. Nutation is difficult to describe in words, but easy to
Figure 8E5.-Nutation of the waveguide.
149
demonstrate. Hold a pencil in two hands; while holding the eraser end as still as possible, swing the point through a circle. This motion of the pencil is nutation. (The pencil point corresponds to the open, or transmitting, end of the waveguide.) In an actual installation, this movement of the waveguide is fast, and of small amplitude. To an observer, the wave-guide appears merely to be vibrating slightly.
8E4. Missile response
A beam-riding missile must guide itself to the target by following the scan axis of its guidance beam. The only guidance information available to the missile is that contained in the beam. From this information, the missile guidance system must determine three things: (1) whether or not the missile is on the beam axis; (2) if not, how far it is off the axis, and (3) which way to go to get back on the axis. The first and third requirements are fairly obvious. The necessity for measuring the AMOUNT of error is less apparent.
During the early stages of guided missile development, one of the more serious problems was "overshooting." When a missile moved off course, and received a signal intended to correct the error, it would turn back toward the course, but overshoot and go too far in the opposite direction. This effect was caused by the lag in the response of the control system to guidance signals, and in the response of the missile itself to movement of its control surfaces. For practical purposes, this problem has been solved by the use of error signals proportional in magnitude to the errors they are intended to correct. Thus if a missile is far from the beam axis it will generate a large error signal, and its control surfaces will be turned through a relatively large angle. But, as the missile moves back toward the beam axis, its error signal steadily decreases, and the angle of its control surfaces is decreased accordingly. At the instant the missile reaches the beam axis, its control surfaces will (in theory at least) have reached their neutral position, and overshooting will be prevented.
Now let us see how the missile determines whether or not it is on the scan axis. Figure 8E6 represents a missile below the scan axis of the guidance beam. The path of the lobe axis is a circle. And the amplitude of the
Figure 8E6.-Missile below the beam axis.
radar signal is at a maximum along the axis of the lobe. As the lobe axis sweeps near the missile, the signal will be strong; as it sweeps away from the missile, the signal will decrease. To the missile, it will appear that the signal strength is regularly changing in amplitude, at the same frequency as that of the scan cycle.
The missile receiver is provided with a detector, which eliminates the r-f carrier frequency and produces a sine wave signal of the scan frequency. When this a-m signal is present, the missile knows that it is OFF the scan axis of the beam. When the a-m signal is absent, the missile knows that it is ON the axis. To see this clearly, look at figure 8E6 and imagine the missile on the scan axis. It is now at the same distance from the lobe axis throughout the scan cycle, and the amplitude of the r-f signal it receives remains constant.
From the AMPLITUDE of the a-m signal, the missile can determine how far it is from the scan axis. When the missile is on the axis, the amplitude of the a-m signal is zero, indicating zero error. If it is only a short distance from the scan axis, its distance from the lobe axis changes only slightly during the scan cycle. The a-m signal will thus be small, indicating a small error. Now, looking at figure 8E6, imagine the missile at some point on the circular path of the lobe axis. The variation in its distance from the lobe axis during the scan cycle is now at a maximum. The a-m signal will also be at a maximum,
150
producing the maximum error signal and maximum movement of the control surfaces.
(It is apparent that if the missile moves to a point OUTSIDE the circular path of the lobe axis, the error signal will decrease. But this does not happen in practice, unless the missile is defective. The guidance and control systems are too sensitive to allow so large an error to develop.)
How the missile determines the DIRECTION of its error can best be explained in two steps. Figure 8E7 shows an imaginary scanning system in which the lobe of radar energy, instead of sweeping out a cone, has only two positions-up or down. The two lobes are transmitted alternately. The figure shows the missile below the scan axis, near the axis of the lower lobe. The missile will receive signals from both lobes, but those from the lower lobe will be of greater amplitude. If we can provide the missile with some means for distinguishing between the two lobes, so that it can tell WHICH ONE has the stronger signal, it can determine the direction of its error. For example, if the missile in figure 8E7 can determine that it is the LOWER lobe that has the stronger signal, it will know that it must move up to get back on the scan axis.
Figure 8E7.-Two-lobe scanning system.
There are two fairly simple ways in which we can identify the two lobes so that the missile can distinguish between them. (We cannot, of course, make them of different amplitude, since a missile on the scan axis would then detect a false error signal.) Beam-rider radar transmission consists of an extremely
high-frequency carrier wave, which is transmitted in short bursts, or pulses, separated by periods of no transmission. The pulse repetition rate is ordinarily in the order of from one to a few thousand per second. We can identify the two lobes shown in figure 8E7 by making them differ either in carrier frequency or in pulse repetition frequency. In either case the missile could easily be provided with a means for distinguishing between them, and could then determine the direction of its error.
Thus the imaginary two-lobe scanning system could be used for guiding a beam rider in a vertical plane. If we add two additional lobes, each of which the missile can distinguish from the other two, it would also be possible to guide the missile to right or left. It should now be apparent that we can guide the missile in any direction by using a conical scan.
Look back at figure 8E6. Assume that we vary the signal frequency (either the carrier or the pulse rate) sinusoidally at the scan frequency. Assume that when the lobe is at its highest point, the signal frequency is at a maximum. As it moves around to the right side of its circular path, the signal frequency decreases to its average value. At the lowest position of the lobe, the signal frequency is at a minimum. It increases to average value as the lobe approaches the left side of its path, and to a maximum as it returns to its highest position. Thus the signal of the guidance beam is frequency modulated at the scan frequency. Note that the f-m signal is always present at the missile, regardless of whether it is on or off the scan axis.
The missile receiver is provided with an f-m section, the output of which is a sine wave that indicates the instantaneous position of the lobe in its scan cycle. The sine wave will have a maximum positive value when the signal frequency is maximum; it will pass through zero as the signal passes through its average frequency; it will reach its maximum negative value when the signal frequency is at a minimum.
The missile can determine the direction of its error by comparing the phase of the f-m signal with that of the a-m signal. Refer to figure 8E6 again; here the missile is directly below the scan axis. The signal will be strongest, and the a-m signal will reach its maximum positive value, as the lobe passes through its
151
lowest point. At that time the signal frequency will be minimum, and the f-m signal will be at its maximum negative value. Thus the two signals are 180° out of phase. If the missile were above the scan axis, the a-m signal would be strongest at the instant when the f-m signal reached its highest frequency. Both signals would be at their maximum positive value, and therefore exactly in phase. There is a definite phase relationship for every off-axis position of the missile. If the missile is directly to the right of the axis, the f-m signal leads the a-m signal by 90°; if it is directly to the left, the f-m signal lags 90° behind the a-m, etc.
Phase comparison is a fairly easy job for an electronic computer. The computer has been programmed to measure the phase relationship, to determine the direction in which the missile must move to return to the scan
axis, and to send the necessary orders to the control system. The control system, in turn, moves the control surfaces to change the missile course in the required direction.
To summarize: The guidance beam is conically scanned, and frequency modulated at the scan rate. If the missile detects an a-m signal, it will know that it is off the scan axis; if it detects no a-m signal, it will know that it is on the axis. The amplitude of the a-m signal indicates the size of the error. A large error will produce a large movement of the missile control surfaces. As the missile approaches the beam axis the error decreases, and the position of the control surfaces gradually returns to neutral, to prevent overshooting. The phase relation between the a-m and f-m signals indicates the direction of the error.
F. Limitations
8F1. General
Every mechanical or electrical system has limitations that cannot be exceeded. When working with complex mechanisms, such as guided missiles, it is as important to know limitations as it is to know the capabilities. Unless the limitations are known, a costly missile might be wasted.
One important limitation is the maximum range at which reliable control can be maintained. We have mentioned line-of-sight limitation. Bear in mind that this statement does not mean that the missile must remain within range of vision. It does mean that control may be lost if the path between the missile and the guidance radar extends over the horizon or is blocked by hills or mountains.
Another limitation, previously mentioned, is transmitter power. In theory, at least, any amount of power can be generated. Radar systems through pulse techniques, make it
possible to get large peak power output while keeping the average power output within reasonable limits. Practical guidance systems have power limitations due to cost, size, and weight. Obviously, bulky equipment cannot be easily transported or installed aboard ships or aircraft. Therefore, a compromise must be reached to ensure useful results with equipment of reasonable size.
It should also be kept in mind that the radar beam increases in width and decreases in power as the range is extended, resulting in a decrease in both tracking and guidance accuracy at long ranges.
We have previously explained that countermeasures may decrease the effectiveness of an offensive weapon. The susceptibility of a guided missile to countermeasures is a limitation to its use. The effectiveness of countermeasure action can be greatly reduced by using coded-pulse modulation of the radar guidance beam.
152
CHAPTER 9 HOMING GUIDANCE
A. Introduction
9A1. General
In previous chapters, we have discussed guidance systems that are designed to place and hold a missile on a collision path with its target. As we have previously explained, missile guidance can be divided into three phases: launching, intermediate or midcourse guidance, and terminal guidance. The proper functioning of the guidance system during the terminal phase, when the missile is rapidly approaching its target, is of extreme importance. A great deal of work has been done to develop extremely accurate equipment for use in terminal-phase guidance.
This chapter will discuss some of the homing systems that have been found to be effective for terminal guidance, as well as some systems that, in their present state of development, have serious limitations.
The expression HOMING GUIDANCE is used to describe a missile system that can "see" the target by some means, and then by sending commands to its own control surfaces, guide itself to the target. (Use of the word "see" in this context does not necessarily mean that an optical system is used. It simply means that the target is detected by one or more of the sensing systems that will be described later in this chapter).
9A2. Basic principles
Some homing guidance systems are based on use of the characteristics of the target itself as a means of attracting the missile. In other words the target becomes a lure, in much the same manner as a strong light attracts bugs at night. Just as certain lights attract more bugs than others, certain target characteristics provide more effective homing information than others. And some target characteristics are such that missiles depending on them for homing guidance are very susceptable to countermeasures.
Other homing systems illuminate the target by radar or other electromagnetic means, and use the signals reflected by the target for homing guidance.
The various homing guidance systems have been divided into PASSIVE, SEMIACTIVE, and
ACTIVE classes. The name of the class indicates the type of homing guidance in use.
If the target emits the homing stimulus, the system used to detect the target and guide the missile to it is known as a PASSIVE HOMING guidance system. One such system uses radio broadcast waves from the target area as signals to home on.
If the target is illuminated by some source other than itself or equipment in the missile, the system is known as a SEMIACTIVE HOMING system. For example, the target might be illuminated by equipment at the missile launching station.
If the target is illuminated by equipment in the missile, the system is called an ACTIVE HOMING guidance system. An example is a system that uses a radar set in the missile to illuminate the target, and then uses the radar reflections from the target for missile guidance.
9A3. Types of missile response
When the control surfaces of the missile are activated by one of the guidance systems, the missile is showing response to the guidance system. A number of guidance systems have been developed to respond to a variety of signal sources. These sources are:
SOUND. If we go through the frequency spectrum from low to high, we can list systems in order of frequency and start in the audio (low) range. Sound has been used for guidance of naval torpedoes, which home on noise from the target ship's propellers. But a guidance system based on sound is limited in range. The missile or torpedo must use a carefully shielded sound pickup, so that it will not be affected by its own motor noise. And while the speed of a torpedo is low compared to the speed of sound, most guided missiles are supersonic. Because of these limitations, no current missile uses a guidance system based on sound.
RADIO. Most homing guidance systems use electromagnetic radiations. Radio waves are used in one passive homing system. Homing is accomplished by an automatic radio direction finder in the missile. The equipment is tuned to a station in the target area, and the
153
missile homes on that station. This homing system is not restricted by weather or visibility. But it is unlikely that a radio transmitter would be operating under war conditions. In addition, radio jamming can do a most effective job of confusing a missile that uses radio for homing guidance. Our own Conelrad system, for example, is a technique for combating radio guidance systems. Under Conelrad conditions, every broadcasting station in the United States will switch to one of two assigned frequencies. Thus, a missile using radio homing guidance would receive signals from several directions at the same time.
While it is possible to do a thorough job of confusing a radio homing guidance system, there is one possibility that cannot be overlooked. The enemy must use electromagnetic systems for communications and search, and these systems can be used as a source of guidance signals. Also, it is possible for subversive agents to plant small, hidden radio transmitters in target areas.
RADAR. Although radar can be used for all classes of homing guidance, it is best suited for the semiactive and active classes. At present, radar is the most effective source of information for homing guidance systems. It is not restricted by weather or visibility, but under some conditions it may be subject to jamming by enemy countermeasure equipment.
HEAT. One form of passive homing system uses heat as a source of target information. Another name applied to this system is INFRARED homing guidance. Heat generated by aircraft engines or rockets is difficult to shield. In addition, a heated path is left in the air for a short time after the target has passed, and an ultra-sensitive heat sensor can follow the heated path to the object. One present limitation is the sensitivity of sensor units. As sensor units of higher sensitivity become available, infrared homing guidance will become increasingly effective. Such systems will make it difficult to jam the homing circuits, or to decoy the missile away from the target.
LIGHT. A passive homing system could be designed to home on light given off by the target. But, like any optical system, this one would be limited by conditions of weather and visibility. And it would be highly susceptible to enemy countermeasures.
9A4. Use in composite systems
In command and beam-rider guidance, the missile is controlled from the launching site, or from some other point at a considerable distance from the target. But neither of these systems is very effective against moving targets, except at relatively short ranges. The reason is obvious. The closer the missile gets to the target, the farther it is from its control point. At long range, a very small angular error in target tracking, missile tracking, or beam riding could cause the missile to miss its target by a wide margin.
Sidewinder is a Navy missile that uses homing as its only source of guidance. It has been used very effectively at relatively short range. But homing systems are based on information radiated from, or reflected by, the target itself. For targets at intermediate ranges, such signals are extremely weak, and could be used only by missiles with powerful and heavy guidance equipment. At long range, such signals are entirely unavailable.
An answer to this problem lies in the use of a composite guidance system. In this system, the missile is guided during its intermediate phase by information transmitted from the launching site, or other friendly control point. During the terminal phase, it is guided by information from the target. For intermediate-range missiles, either command or beam-rider guidance is suitable during the midcourse phase. A long-range missile would depend either on preset or navigational guidance to bring it to the target vicinity. Missiles of both classes can switch over to homing guidance, based on infrared or radar radiations, as they enter the terminal phase. At intermediate range, the switchover is usually accomplished by radio command. At long range, it is controlled by a navigational device, or by some form of built-in programing system.
The U. S. Navy missile program makes use of composite guidance systems in several of its operational missiles. Talos is a beam rider during its midcourse phase, and switches to radar homing for terminal guidance. Other missiles, such as Sidewinder, Sparrow, Petrel, and Tartar, use homing guidance systems in one form or another for terminal guidance.
515354 O-59-11
154
B. Passive Homing System
9B1. General
As mentioned earlier in this chapter, passive homing systems can be used when the target itself radiates information. Therefore, all of the response systems, with the possible exception of radar, might be used. The exception to radar would not apply if a signal from the target could be picked up by a radar set in the missile. This system would be unreliable; the only source of target information would be under enemy control, and could be switched off at will. But missiles using such a system would have one distinct advantage: they would deny the enemy the use of his own radar.
9B2. Basic principles
The passive homing systems most widely used at present are based on infrared radiation from the target. The sensing mechanism is so designed that it can determine the direction from which the infrared radiation is received; the guidance system can then steer the missile in that direction. There are several ways in which the sensing device can be made to determine the direction of an infrared source. For example, two sensors could be mounted with a baffle between them, so that the one on the right can receive radiation from straight ahead, or from any point to the right of the missile axis. The other sensor will receive radiation coming from the straight ahead or from the other side of the axis. When both sensors receive the same amount of radiation, the target is directly ahead. If the radiation is stronger on one side, the target is obviously on that side. A second pair of ,sensors could be used for up-and-down steering.
Another infrared passive homing system makes use of a sensing device mounted in gimbals, and driven by servo mechanisms. The system is so designed that the sensing device will constantly track the target. Thus, the axis of the sensing device, in relation to the axis of the missile, provides the required information for steering.
9B3. Target characteristics
In passive homing, the target itself must provide all the necessary information for missile guidance. For this reason the characteristics of an individual target will determine which types of homing system can be used against it, and under what conditions they can be used.
If the target is fixed in location, and has some characteristic by which the missile can readily distinguish it from the surrounding area, the homing guidance problem is simplified. Figure 9B1 represents an air-to-surface or surface-to-surface missile, using a light-sensing guidance system to home on an industrial building. While such a missile might be useful in a surprise attack, industrial plants would certainly be blacked out during a war. A light-homing missile would then have no way to distinguish the target from its background. But infrared passive homing could be used in this application. And it would probably be more effective than light-homing, since the heat generated by an industrial plant can not be readily controlled.
Figure 9B2 represents a passive infrared homing missile attacking an aircraft. The Navy's Sidewinder uses this type of guidance. The tailpipe of a jet aircraft is a strong source of infrared radiation, which cannot be
Figure 9B1.-Missile using light-homing guidance.
155
Figure 9B2.-Missile using heat-homing guidance.
concealed. In a tail-chase attack, the Sidewinder is highly effective. Against an approaching jet aircraft, Sidewinder and similar missiles are of little use.
A sound-homing system might also be used against a jet aircraft target, even though both target and missile are traveling faster than sound. Such a system might be used in a tail chase, provided the target does not maneuver radically. But you have probably observed that when a jet passes over at moderate altitude, the sound appears to come from a point at some distance behind the aircraft. A sound-homing missile would steer itself toward the source of sound, rather than toward the target itself. For an approaching or crossing target, the required trajectory would be too sharply curved for the missile to follow.
9B4. Missile components
When passive homing guidance is used, the missile must contain all of the equipment needed to pick up, process, and use the information given off by the target. The kind and amount of equipment required is determined to a large extent by the guidance system used, and by the characteristics of the target.
Consideration must also be given to: the maximum range, information required, accuracy, operating conditions, type of target, and speed of the target. The components of the guidance system in the missile can be sectionalized for separate discussion. We will explain the purpose of each section. Figure 9B3 shows a block diagram of a passive homing guidance system.
ANTENNA OR OTHER SENSOR. Since information given off by the target is to be used for guidance, some means must be provided to pick up the information. For electromagnetic systems, a conventional radio or radar antenna (streamlined into the missile) would be used.
A heat-sensing detector, rather than an antenna, is used with infrared homing guidance systems. One of the basic heat detectors is called a THERMOCOUPLE. When two dissimilar metals, such as iron and copper, are joined and heat applied to the junction of the two metals, a measurable voltage will be generated between them. Figure 9B4 shows a basic thermocouple.
The voltage difference between the two metals is quite small, but the sensitivity can be increased to a point where the thermocouple becomes useful as a detector of heat. The
156
Figure 9B3.-Block diagram of passive homing guidance system.
increase in sensitivity is obtained by connecting, or stacking, a number of thermocouples in series, so that they form what is known as a THERMOPILE. The complete thermopile action is similar to that obtained when a number of flashlight cells are connected in series. That is, the output of each individual thermocouple is added to the output of the others. Thus ten thermocouples, with individual output voltages of .001 volts, would have a total output of .010 volts when connected in series.
The sensitivity of a thermopile heat detector can be further increased by mounting the thermopile at the focal point of a parabolic reflector. When this method is used, heat rays given off by the target are focused on the thermopile by the reflector.
Another type of heat detector is called a BOLOMETER. This device depends on the change of electrical resistance of a material when heated. In a simple type of bolometer, two thin strips of platinum are used to form two arms of a Wheatstone bridge. To increase the thermal sensitivity of the strips, each is blackened on one side. The heat to be measured is applied to one of the strips, and is absorbed by its blackened surface. As the strip absorbs heat, its resistance changes and unbalances the bridge. This unbalance causes
a change in the current produced by an external voltage applied to the input terminals of the bridge.
Figure 9B5 shows a modern bolometer; it consists of four nickel strips supported by phosphor bronze springs. These springs are supported by mounting bars, which have electrical connection leads attached to them. A silvered parabolic reflector (mirror) is used to focus infrared rays on the bolometer. The bridge unbalance current, produced as a result of resistance changes, is used to set in motion the other sections of the guidance system.
Figure 9B4.-A basic thermocouple.
157
Figure 9B5.-Modern bolometer.
Still another form of infrared detector is shown in figure 9B6. It is called a GOLAY DETECTOR. This detector is a miniature heat engine. The Golay heat cell operates on the principle that a pressure-volume change occurs in a gas when its temperature is changed. At the forward end of the cell is a metal chamber which encloses the gas. The front of the chamber is covered by a membrane, which acts as a receiving element. The back of the chamber is closed by a flexible mirror membrane. When radiant heat strikes the receiver, it raises the temperature of the gas in the chamber. The resulting increase in pressure distends the mirror membrane. Light from a small exciter lamp (fig. 9B6) is focused by a lens, and then passed through a grid of parallel lines. The light is then reflected by the mirror membrane, back onto the grid.
When the mirror membrane is not distended, it reflects the image of the open spaces in the grid back onto the opaque lines of the
Figure 9B6.-A Golay detector.
grid. Thus no light can pass back through the grid. But when the mirror membrane is distended, the image of the open spaces in the grid passes back through those same open spaces. Thus the amount of light passing back through the grid provides an indication of how much the mirror membrane is distended, and, indirectly, of how much heat is reaching the detector.
A part of the light that passes back through the grid is reflected downward by a diagonal mirror (shown at the lower right in fig. 9B6). This light is then picked up by a photoelectric cell. The output of the photo cell thus provides an indication of radiant heat entering the detector. The device is quite sensitive, since a small amount of mirror distortion produces a considerable change in photo cell illumination. The Golay detector has the most rapid response of any infrared detector, but it can operate only when radiant heat is received intermittently. For some guidance systems this factor makes the Golay detector useless; in others it causes no difficulty.
In the light-homing guidance systems, the pickup device or sensor is a photoelectric cell. The operation of this device is based on the fact that certain metallic substances emit electrons when they are exposed to light. Modern photoelectric cells are quite sensitive to light variations; but, because light is easily interrupted, the system is subject to interference. One type of photoelectric cell is shown in figure 9B7.
Figure 9B7.-A photoelectric cell.
158
The objection to photoelectric cells has been partially removed by the recent development of cells with a sensitivity in the infrared region. However, the extension of the range of operation changes the sensor from a pure photoelectric device to a thermoelectric device. It is then similar in operation to a heat sensor.
ANTENNA OR SENSOR DRIVE. Previous chapters have described antenna scanning
methods. The reflectors mentioned for heat or light homing sensors act in the same way as a radar reflector. Therefore, greater control accuracy can be obtained by scanning a target with the reflector and sensor units.
Should the sensor temporarily lose sight of the target, a spiral or sawtooth scan, as shown in figure 9B8, could be used to find the target again. Notice that both types of scan cover a large area.
Figure 9B8.-Spiral and sawtooth scanning.
The scanning action is controlled by the antenna or sensor drive unit, which is shown in the block diagram of figure 9B3.
After the antenna or sensor has picked up the information, other equipment in the missile must convert the information into error signals, if the missile is off course. Before this can be done, however, there must be something to compare with the sensor signal.
REFERENCE UNIT. The comparison voltage is taken from the reference unit. This voltage may be o b t a in e d from an outside source, or it may be taken from recorded information that was put into the missile before launching. Actual operation of the missile guidance controls takes place only when an error signal is present. Note that the reference unit is connected to both the pitch and yaw comparators in the block diagram of figure 9B3.
SIGNAL CONVERTER. The output of the sensor unit is an extremely small voltage. This voltage is fed to a signal converter, which
builds up the strength of the signal and interprets the information contained in it. The output of the signal converter is fed to the pitch and yaw comparators along with the signal from the reference unit.
COMPARATORS. The comparators are electronic calculators that rapidly compare reference and signal voltages and determine the difference (error), if any, between the two signals. It is possible for an error signal to be developed in the pitch comparator while no error signal is developed in the yaw comparator. Should this happen, the missile would be higher or lower than the desired trajectory. The output voltage from the pitch comparator is then fed to the missile automatic pilot.
AUTOPILOT. The automatic pilot, or autopilot, operates missile flight controls in much the same way as a human pilot operates airplane controls. The components making up the autopilot assembly have been described elsewhere in this text. In order to shift the flight controls, the autopilot must get "orders" from
159
some circuit. The orders are in the form of error signal voltages from the comparators. The error signal voltages
operate motors or hydraulic valves which, in turn, operate the flight control surfaces.
C. Semiactive Homing System
9C1. Basic principles
In a semiactive homing system, the target is illuminated by some means outside the target or the missile. Normally, radar is used for this type of homing guidance, by sending a radar beam to the target. The beam is reflected from the target, and picked up by equipment in the missile. The radar transmitter might be located at a ground site, or it might be a mobile unit aboard a ship or aircraft.
9C2. Launching station components
In a semiactive homing guidance system, the launching station components are similar to those required for a beam-rider guidance system (chapter 8). The target is tracked by radar. The tracking radar itself may be used as the source of target illumination for missile guidance, or a separate radar may be used for this purpose.
9C3. Missile components
The missile, throughout its flight, is between the target and the radar that illuminates the target. It will receive radiation from the launching station, as well as reflections from the target. The missile must therefore have some means for distinguishing between the two signals, so that it can home on the target rather than on the launching station. This can be done in several ways. For example, a highly directional antenna may be mounted in the nose of the missile, as noted below. Or the doppler principle may be used to distinguish between the transmitter signal and the target echoes. Since the missile is receding from the transmitter, and approaching the target, the echo signals will be of a higher frequency.
For the purposes of this text, we can think of the missile guidance components as divided into several distinct sections. These are shown in block diagram form in figure 9C1.
ANTENNA. Radar is generally used for semiactive homing guidance. The antenna in
Figure 9C1.-Block diagram of semiactive homing system.
the missile must therefore be capable of detecting radiation at radar frequencies. It is mounted in the nose of the missile, since information is being obtained from the target area and the missile is approaching the target nose first. When a beam-riding system is used for the intermediate phase of guidance, a separate beam-rider antenna is mounted near the tail of the missile.
ANTENNA DRIVE. In some systems, the homing guidance antenna may use a form of conical (or nutating) scan in order to take full advantage of the guidance signal. Conical scanning has the advantage that the antenna can receive signals from points off the missile axis. This decreases the chance that the missile, while homing, may lose its target and go out of control.
RECEIVER. A radar-type receiver must be used in the missile when radar is used for semiactive homing. The signals picked up by the antenna as it scans the target area are fed into the receiver. The receiver operates in a conventional manner as described in chapter 7. The signals at the output of the receiver are not suitable for use in activating the missile flight controls without further processing.
SIGNAL CONVERTER. The receiver output is fed to the signal converter, which changes the signal to a form that can be used
160
for comparison with signals from another section of the missile electronic equipment.
REFERENCE UNIT. The reference unit furnishes the comparison signal. This information might be placed in the missile just prior to launching. It could be stored in a variety of forms, such as magnetic wires, magnetic tapes, punched paper tapes or punched cards. Before a guidance system can function, an error signal must be produced. The error in flight path, if any, can be determined by comparing the reference signal and the signal from the converter section. Comparison of the two signals takes place in other sections of the missile electronic equipment.
COMPARATORS. The missile flight controls may be used to correct the lateral or vertical trajectory of the missile. Since it is possible for the missile to be on the right course vertically but off course laterally, two comparators are used. The output from the reference unit and the output from the signal converter are fed to both the pitch and yaw comparators.
Should there be no difference in the two signals at either comparator, the controls would remain in neutral position. However, should there be a difference in the two signals at either comparator, error signals will be generated. The error signals are not suitable for use in controlling the missile flight surfaces and must be sent to other sections of the guidance system before they can be used.
AUTOPILOT. The missile flight control surface operation is controlled by autopilots. These devices are a combination of gyroscopes
and electrical units which have been described elsewhere in this manual. The autopilot controls operation of the hydraulic system which, in turn, operates the flight control surfaces. There are two autopilots-one for the pitch control surfaces and one for the yaw control surfaces.
9C4. Comparison with passive homing
The passive guidance system obtains all guidance information from the target, without assistance from any other outside source. The semiactive homing system needs some source outside the target or missile in order to obtain course information.
The advantage of the passive system is that it needs no source of information other than the target. The equipment carried by the missile is less than that required for most other systems. The disadvantage of the passive guidance system is its dependence on the target. It is highly unlikely that an enemy would leave target areas lighted, or permit electromagnetic forms of broadcasting from the target areas.
In the semiactive system, control information comes from a source outside the missile or target area. A semiactive homing system depends for guidance on equipment outside the target area or the missile. This requires extra equipment, both in the missile and at the launching or control point. Semiactive homing systems, like most guidance systems, are subject to jamming and other forms of interference.
D. Active Homing Guidance
9D1. Basic principles
The active guidance system uses equipment in the missile to illuminate the target, and to guide the missile to the target. Usually, a radar set is used for target illumination. The signals return to the missile as radar echoes, which are processed for use as guidance signals.
9D2. Missile components
The missile components in an active homing guidance system include all those used in a
semiactive homing guidance system, plus a radar transmitter and duplexer. The principal components are shown in the block diagram of figure 9D1.
ANTENNA. The antenna is the same as described for the semiactive system, and is mounted in the nose of the missile.
ANTENNA DRIVE. When the target area is conically scanned, the antenna driving unit provides the power needed for this purpose.
TRANSMITTER. The transmitter carried in the missile is similar to a conventional radar transmitter. It may use either FM or pulsed modulation. Since homing guidance does
161
Figure 9D1.-Block diagram of active homing guidance system.
not require long range equipment, the transmitter power can be considerably less than that used for command guidance or tracking. The method of modulating the transmitter can be changed frequently to lessen the effectiveness of enemy countermeasures.
DUPLEXER. The duplexer is a form of electronic switch. In operation, it serves to connect the antenna to the transmitter during the sending of a pulse. At the same time, it presents a high impedance (electrical opposition) at the receiver input. This keeps the powerful transmitter pulse from damaging the receiver.
As soon as the pulse is transmitted, the duplexer then offers a low impedance path from the antenna to the receiver. The action of the duplexer provides an automatic switching means, so that the same antenna can be used for both transmitting and receiving.
REFERENCE UNIT. The reference unit in the active homing guidance system serves the same purpose as those in the passive and semiactive homing guidance systems.
SIGNAL CONVERTER. The output of the receiver is fed to the signal converter, so that the reflected signal will be suitable for comparison with the output of the reference unit. The purpose and operation of the signal converter is the same as for the semiactive homing guidance system.
COMPARATORS. The comparators serve the same purpose as those in the semiactive system.
AUTOPILOT. The missile flight controls are operated by the hydraulic system, which is activated by the autopilot in the same way as described for the semiactive system.
9D3. Comparison with semiactive homing system
The active homing guidance system may be used in any application where the target can be distinguished from the surrounding area by the radiation it reflects. Of course, the more prominent the target, the greater the accuracy of homing guidance.
An advantage of the active homing guidance system is its independence from any outside source of target illumination. At the same time, this is a disadvantage because of the added equipment needed in the missile. Also, the system is subject to countermeasures. But this problem is less serious than it might be, because the homing guidance equipment is active for only a relatively brief part of the missile's flight time.
E. Homing Trajectories
9E1. Zero-bearing course
A homing missile uses one of two methods in approaching a target. When the missile flies directly toward the target at all times, the trajectory is known as a ZERO BEARING or PURSUIT approach.
All of the homing guidance systems we have described have had the sensor unit (thermopile, light cell, microphone, or antenna) mounted in the nose of the missile. The sensor
is fixed to the missile frame so that it maintains a constant relationship to the missile axis. The equipment in the missile is then able to process the information picked up by the sensor, so that the missile can be continually pointed toward the target. A possible flight path for a ground-to-air missile is shown in figure 9E1. Notice how the flight path must curve as the missile approaches the target. The sharp curvature in the path sets up strong lateral accelerations during the terminal
162
Figure 9E1.-Zero bearing flight path.
phase of flight. These transverse accelerations present a strong objection to the use of a zero-bearing approach against high-speed air targets.
Another objection to the zero-bearing approach system is that the missile speed must be considerably greater than the target speed. As shown in figure 9E1, the sharpest curvature occurs near the end of the flight. At this point, the missile is "coasting" because the booster and rocket motor thrusts last for only a short part of the flight.
More power is required to make sharp radius, high speed turns at a time when the missile is losing speed and has least turning capability. Often the amount of turn required is beyond the aerodynamic capability of the missile at that time, and the missile therefore cannot hit the target.
9E2. Lead angle or collision course
The second method of approach to the target is called LEAD ANGLE course. It is also known as a CONSTANT BEARING or COLLISION course. The trajectory of a ground-to-air missile using this method of approach is shown in figure 9E2.
Notice that the missile path from the launcher to the collision point is a straight line. The missile has been made to lead the target in the same manner as a hunter leads a bird in flight. In order to lead the target and obtain a hit, a computer must be used. The computer continually predicts the point of missile impact with the target. If the target takes no evasive action, the point of impact remains the same from launching time until the missile strikes. Should the target take evasive
163
Figure 9E2.-Lead angle method of approach.
action, the computer automatically determines a new collision point. It then sends signals to the autopilot in the missile, to correct the course so that it bears on the new collision point.
As shown in figure 9E2, the collision point and the successive positions of missile and target form a series of similar triangles. If
the missile path is the longer leg of the triangle, as it is in the figure, the missile speed must be greater than the target speed-but not as great proportionally as with a zero-bearing approach.
The transverse acceleration required of a missile using the lead-angle approach is comparatively small.
164
CHAPTER 10 OTHER GUIDANCE SYSTEMS
A. Preset Guidance
10A1. Introduction
In earlier chapters we described guidance systems in which the missile trajectory depends on information received from one or more control points, or from the target itself. But, under certain conditions, these systems are impractical. This is especially true for long-range missiles. In this chapter, we will discuss several guidance systems, in which the missile is independent of control points and target signals.
Perhaps the simplest of these is the PRESET GUIDANCE system. The name is completely descriptive. In this system, all the information needed to make the missile follow a desired course, and terminate its flight at a desired point, is set into the missile before it is launched. This information includes the desired heading, altitude, time or length of the flight, and programmed turns (if any).
Preset guidance may be used when the target is beyond the range of control points, or when it is necessary to avoid countermeasures that might be effective if the missile were guided by outside signals.
In setting up a flight plan for preset guidance, missile speed is used to determine the required time of flight. Assume, for example, that a missile is to be fired at a target 500 miles north of the launching site. The direction and distance of the target from the launch site have been accurately determined. Assume that the speed of the missile can be controlled, or at least can be predicted with enough accuracy to program the flight.
If we assume an average missile speed of 2000 miles per hour, the missile would require 15 minutes to travel from the launch site to the target. The built-in control system would take the missile to cruising altitude, keep it headed north for 15 minutes, and then move its flight surfaces to make it dive straight down on the target.
Preset guidance has several limitations. Such things as headwinds and crosswinds will obviously affect the speed and course of the missile. To compensate for the effects of wind, the missile would need some means for
measuring its ground speed, and for changing its air speed as required. But, when solid fuels are used, changing the air speed of the missile is difficult.
Crosswinds may exist at one altitude but not at another. Thus the altitude at which a missile operates may have a pronounced effect on its course. If the effect of wind on missile heading cannot be controlled by choice of altitude, then it must be controlled by programmed steering of the missile. One of the greatest limitations of a preset guidance system is that the flight program cannot be changed after the missile is launched. Therefore precise information on winds along the missile flight path will be needed for accurate programming.
10A2. Information set in the missile
The initial course or heading of the missile may be preset by training the launcher. This operation is similar to that of training a gun. However, once the missile is started on the correct heading, its own equipment takes over. References may be used to determine deviations from the preset course, and to keep the missile headed in the right direction. For example, the flight might be programmed to use the earth's magnetic field to keep the missile headed toward magnetic north, or in some other specified direction.
The missile altitude may be corrected by changing the pitch of the missile. A barometer - type sensing element is connected to a servo mechanism that operates the flight control surfaces. When the barometric pressure changes because of a change in altitude, the servo acts to bring the pressure back to the preset value by correcting the missile's altitude. Although this method of altitude control is not extremely accurate, the control pressure can be preset to fairly close tolerances before the missile is launched.
One of the most precise components of a preset guidance system is its timing section. Accurate timing elements are available to fit almost any requirement. The distance covered by a missile during its flight is determined by its ground speed and the length of time it is in
165
the air. Therefore, if the speed of the missile is known, the controls may be preset to dive the missile at the end of a definite time interval after launching. The timing element can be anything from a simple watch movement to an electronic circuit controlled by a tuning fork or a crystal oscillator. The time interval may be set at any time before launching, but of course it cannot be changed during flight.
It is possible to program changes in course, and timing circuits may be used to set up the program. For example, the missile could follow a due north course for 15 minutes, then turn 30 degrees east, and follow the new course for 10 minutes before starting its terminal dive on the target. In another case, to provide deception, the missile might be programmed to fly due north for 10 minutes, then 30 degrees east for 5 minutes before turning 30 degrees west to get back on the original heading.
10A3. Heading reference
The missile control systems must have a reference from which to measure the up-down or right-left deviation of the missile. Since the desired heading is a compass direction, the sensing unit may be a form of compass.
In an earlier chapter we described the flux valve and its uses in control systems. If magnetic headings are to be followed, the flux valve may be used as the sensing element. By using a time reference in combination with a magnetic reference, the missile controls may be preset to follow a single heading for required time. Or changes in heading can be programmed to occur at preset times.
The electrically driven gyro is another type of heading control. The gyro's spin axis is tangent to the earth's surface. At the time of launching, with the gyro wheel spinning rapidly, the axis is pointed in the desired direction before the gyro is uncaged. During the missile flight the gyro axis continues to point in the original direction, and the missile can therefore use it as a steering reference.
10A4. Altimeters
In previous chapters we have shown that an altimeter can be used to control missile altitude within small limits. Altitude control is an important part of preset guidance, since it
is possible to get favorable wind direction or avoid unfavorable winds by choosing the proper altitude.
The reference for preset altitude control is normally a potentiometer in one arm of a bridge circuit. A potentiometer in an adjacent arm of the bridge is operated by a pressure-sensitive bellows system. The bridge can be preset for balance at the desired altitude. When the missile reaches the preset altitude, its flight control surfaces will bring it into level flight. Any subsequent change in pressure will unbalance the bridge, and the amount and direction of unbalance will determine the correction to be applied. This system will be described in more detail later in this chapter.
10A5. Length of flight
In low-speed missiles an AIR LOG, as well as a timing device can be used to measure the distance covered during missile flight. The air log operates on the principle of an air screw, or impeller, which makes a specific number of revolutions while moving through the air for a given distance at a given speed. The number of revolutions per unit of distance depends on both the pitch of the blades and the density of the air.
Generally, an air log is attached to the outer surface of the nose of the missile, and consists of a small four-bladed impeller mounted on a shaft that drives a reduction gear with a ratio of 30 to 1; that is, for every 30 revolutions of the air screw, the driven gear makes 1 revolution.
The driven gear is made of insulating material, and carries a pair of contacts mounted at diametrically opposite points. These contacts close a magnetic relay circuit twice in each revolution of the gear, or once for each 15 revolutions of the air screw.
The magnetic relay is connected to a device called a Veeder counter. The counter mechanism is similar to that of the total mileage indicator (odometer) of an automobile. The Veeder counter is shown in cross-section in figure 10A1.
To use the air log for length-of-flight regulation, the calibrated drums are turned to a setting that represents the desired distance of travel for the missile. Each time the contacts of the magnetic circuit close, they trip the counter mechanism, thus indicating that a
166
Figure 10A1.-Veeder counter cross-section.
certain specific distance has been traveled. Each time the mechanism is tripped, it moves the drums back one digit from the preset figure. When the count reaches zero, the predetermined destination ha s been reached. This may be either the point where the warhead is to be detonated, or the point at which the missile is to start its terminal dive on the target.
In the preceding discussion, we have shown how a digital counter is used to measure flight distance. Now let us see how air speed may be measured and controlled.
Figure 10A2 is a diagram of an air speed reference and transducer unit. The resistors R1 and R2 are identical potentiometers. Together they form the four arms of a resistance bridge.
The moving arm of R1 is mechanically driven by a bellows, which is connected to a tube leading to the nose of the missile. As the missile moves through the air, ram air pressure is built up in the bellows. The amount of pressure is determined by the air speed.
In operation, R2 is preset to a value that represents the desired air speed. When the moving arm on R1 is in the same position as that of R2, the bridge is balanced and there is no output. Because the arm of R1 is connected to the bellows, the bridge will be balanced whenever the ram air pressure equals the preset value. For perfect operation, the movement of R1 must be proportional to the change in air speed. This is difficult to achieve in practice. But because the missile speed needs to be constant only within certain limits, the
167
Figure 10A2.-Air speed transducer.
required accuracy can be obtained with presently available components.
When the bridge becomes unbalanced because of a change in ram air pressure, current will flow through the primary winding of the output transformer. The magnitude of the voltage induced in the transformer secondary is determined by the amount of bridge unbalance, which in turn is determined by the ram air pressure. The output voltage is used to operate the throttle controls. This system serves as both an air speed detector and a fixed reference; speeds either above or below the preset value will produce an output signal, and cause the throttle to correct the error.
10A6. Use in composite systems
A composite guidance system is made up of two or more individual guidance systems. These systems may work together during all phases of the missile's flight, or they may be programmed to operate successively. It is sometimes necessary to combine systems because of the wide differences in requirements that must be met to ensure that the missile reaches the target. Let us review these requirements, to see how preset guidance may be used in a composite system.
During the launching period, high acceleration puts a great strain on normal guidance components and prevents their use. The acceleration forces may close relays, precess gyros, and saturate accelerometers far beyond the sensitivity needed for normal guidance. For this reason, most midcourse guidance systems must be modified extensively to withstand the launch acceleration. The modification may involve the use of comparatively
insensitive components, or a temporary alteration of the regular components.
The precautions against high acceleration damage to components include careful balancing and positioning of elements that are not used during the launch cycle. In addition, movable parts of regular guidance systems are locked in position, or the circuits in which they operate are neutralized to withstand the launch acceleration.
Missiles are designed to have sufficient flight stability during the initial period of high acceleration, before the regular guidance system takes over. The regular guidance system may be unlocked by an internal timer, or it may be activated when the booster section, if any, drops off.
A preset guidance system might be used for the midcourse part of a flight. When used in a composite system, the preset system would turn the missile control over to a separate terminal guidance system when the missile approaches the target. In an application of this type, the preset guidance system might be set up to take over control again in the event the terminal guidance system did not operate. Then, when the missile reached the approximate location of its target, the preset guidance system would either detonate it or cause it to dive, depending on the setting.
10A7. Ballistic missiles
A ballistic missile is a guided missile which, during a major part of its flight, is neither guided nor propelled. During this part of the flight it follows a free ballistic trajectory, like a bullet or a thrown rock. A number of factors operate to determine the
168
trajectory of a bullet, a rock, or a ballistic missile. These factors include the point of origin, the initial direction and velocity, air pressure, wind, and other factors mentioned in chapter 2 of this text. If all of these factors are accurately known, it is possible to calculate the point at which the ballistic object will strike the earth. And, if the desired point of impact is a target at a known location it is possible, for any given launching point, to calculate an initial course and velocity that will result in a hit.
A gun projectile is, of course, a ballistic object. The location of gun and target, and the initial velocity of the projectile, are known quantities. Factors such as wind and air pressure can be estimated. It is then possible to calculate the initial direction required for a hit, and, by pointing and training the gun, to fire the projectile in that direction.
The ballistic missile presents a more complex problem. Its range may be measured in thousands of miles, rather than thousands of yards, and its initial velocity is lower than that of a gun projectile. Thus the forces that would tend to influence its trajectory have a much longer time to act. But, at long ranges, ballistic missiles have several outstanding advantages. First, they leave the earth's atmosphere completely; a large part of their flight is in empty space, where they cannot be affected by wind or air pressure. Second, they dive on the target at a steep angle, at many times the speed of sound; this makes interception nearly impossible. Finally, a ballistic missile is invulnerable to electronic countermeasures during the major portion of its flight. Any guided missile is subject to jamming or deception by electronic countermeasures, although coded guidance systems may make this difficult to do. But a ballistic missile, because it is unguided during the terminal phase of its flight, is no more susceptible to electronic countermeasures than is a gun projectile or a rock.
The IRBM and ICBM are, as their names tell you, ballistic missiles. These include ATLAS, THOR, and POLARIS. Other missiles, such as SNARK, have comparable ranges, but are not ballistic missiles because they do not leave the atmosphere, and are propelled and guided throughout their flight.
The foregoing discussion of preset guidance applies principally to aerodynamic missiles,
in which the control surfaces are capable of correcting the trajectory throughout the flight. But preset guidance has features that make it useful in the initial control of ballistic missiles. One possible ballistic system combines features of both preset and command guidance. The problem has already been stated: from known factors, it is possible to calculate an initial velocity and direction that will produce a ballistic trajectory ending at the target. The target location is known; because of the great range, target location is determined from maps, rather than by observation. The location of the launching point is also known. (In the development of the Polaris missile system, a major part of the total effort was devoted to development of a Ship's Inertial Navigation System, by which the Polaris launching vessel can determine its own position with the required accuracy.)
But other factors, such as air pressure and wind at various altitudes, cannot be determined with comparable accuracy. And, because of the extreme range, a small error in the initial direction or velocity will result in a large error at the target. The ballistic missile system deals with this problem by controlling the missile's direction and velocity not at the instant of launching, but at a later time-after the missile has risen above most of the atmosphere, but while it is still within range of radio command.
Ballistic missiles will probably be launched vertically, and will climb straight up in order to get out of the atmosphere as quickly as possible. At a preset altitude, the guidance system will turn the missile onto the required heading, with the required angle of climb. The missile is tracked continuously from the launching point, so that its position will be known as long as it is within radar range. Its instantaneous velocity c an be determined either by establishing a range rate, or more accurately, by Doppler ranging. In the Doppler ranging system, a radio or radar signal is transmitted from the launching point. This signal is received and re-transmitted by the missile. By comparing the frequency of the original signal with that of the signal returned by the missile, it is possible to determine the missile speed with great accuracy.
There are a number of combinations of missile course, position, and speed that would result in a ballistic trajectory ending at the target.
169
But because the missile is constantly changing position at high velocity, no human computation can keep up with the problem. The known factors (position of the target and launching site, and preset heading of the missile) and the measured factors (velocity of the missile, and its position relative to the launching site) are fed into an electronic computer, which produces a continuous solution for the instantaneous values of the problem. When the computer determines that the missile's course, position, and velocity will result in the proper ballistic trajectory, the missile propulsion
system is instantly and automatically shut down. The last stage of the missile then follows a ballistic trajectory, without further propulsion or guidance.
This system can be used effectively with missiles propelled by liquid fuel rockets, since the propulsion system can be shut down simply by stopping the fuel supply. If, like Polaris, the missile is propelled by a solid fuel rocket, the system cannot be used without modification. The Polaris guidance system will be described in a classified supplement to this volume.
B. Navigational Guidance Systems
10B1. Inertial guidance
Inertial guidance is so accurate that the submarine Nautilus on its first cruise under the polar ice cap, was able to use an inertial navigation system that was originally developed for use in long-range guided missiles.
With an inertial guidance system, a missile is able to navigate, from launching point to target, by means of a highly-refined form of dead reckoning. Dead reckoning is simply a process of estimating your position from information on: (a) previously known position; (b) course; (c) speed; and (d) time traveled. For example, assume that a ship's navigator determines his ship's position by astronomical observations with a sextant. The ship's position, and the time, are marked on the chart. Assume that the ship then travels for three hours on course 024, at a rate of 20 knots. From the known position on the chart, the navigator can draw a line 24° east of north, representing the ship's course. By measuring off on this line a distance representing 60 nautical miles (20 knots times 3 hours), the navigator can estimate the ship's new position by dead reckoning. If the ship changes course, the navigator will mark on the chart the point at which the change occurred, and draw a line from that point representing the new course.
A missile with inertial guidance navigates in a similar way, but with certain differences. It determines the distance it has traveled by multiplying speed by time. But it can not measure its speed directly if it is traveling at supersonic velocity outside the earth's atmosphere. However, it can use an accelerometer
to measure its acceleration, and determine its speed by multiplying acceleration by time. To summarize:
velocity = acceleration x time
distance = velocity x time
The acceleration, of course, is not constant. It may vary due to uneven burning of the propellant. It will tend to increase as the missile rises into thinner air. Positive (forward) acceleration will become zero at burnout. If the missile is still rising at that time, it will have a negative acceleration because of gravity; if it is still in the atmosphere, it will have a negative acceleration because of air resistance. Acceleration will cause a constantly changing speed, and changing acceleration will change the rate at which the speed changes. If the missile is to determine accurately the distance it has traveled under these conditions, its computer circuits must perform a double integration. Integration is, in effect, the process of adding up all the instantaneous values of a changing quantity.
Both the accelerometers and the integrating circuits are fairly complex. But we can describe a simple, hypothetical system here that will be correct in basic principles. Assume that the accelerometer is a weight that can slide back and forth along the axis of the missile. The weight is mounted between two springs, which hold it in a neutral position when there is no acceleration. If there is a positive acceleration (tending to make the missile go faster), the weight will lag aft against the spring tension. If the acceleration stops, the weight will return to neutral position. If there is a negative acceleration
515354 O-59-12
170
(tending to slow the missile down), the weight will move forward from its neutral position.
Now assume that the weight is connected to a potentiometer, in such a way that the potentiometer output is zero when the weight is at the neutral point. If the weight lags aft, the potentiometer output is a positive voltage; if the weight moves forward from the neutral point, the potentiometer output is a negative voltage. For an integrator, we can use a simple capacitor. During positive acceleration, the capacitor will gradually take on a positive charge from the potentiometer. If the acceleration then becomes zero, the charge on the capacitor will stop increasing, and will remain constant (indicating a constant speed). If the acceleration becomes negative, the charge on the capacitor will begin to drain off (indicating a decreasing speed). Thus the charge on the capacitor is the output of the first integrator.
If the first integrator output voltage is applied to the grid of a vacuum tube, it can be used to determine the rate at which current flows through the tube and into a second
capacitor. The rate of current flow at any instant is proportional to the first integrator output, and therefore to missile speed at that instant. Thus the charge on the second capacitor is the output of the second integrator, and represents the total distance traveled up to any given instant.
Figure 10B1 is a block diagram of a simple inertial guidance system. This system has two channels-one for lateral and one for longitudinal acceleration. It uses both the direction channel and the distance channel to determine missile position. Each channel contains an accelerometer and circuit for double integration. The accelerometers detect missile velocity changes without the use of any reference outside the missile. The acceleration signals are fed to a computer which continuously produces an indication of both lateral and forward distance traveled by the missile. This is accomplished, in each channel, by integrating the missile acceleration signal to obtain a missile velocity signal. When this velocity signal is integrated, the result indicates the total distance that the missile has traveled.
Figure 10B1.-Simple inertial guidance system.
171
DIRECTION CHANNEL. If the missile is on course, the output of the direction channel will be zero at all times. If the missile drifts off course, the output voltage of the second integrator will show, by its amplitude and polarity, the distance and direction the missile is off course. The output of the first integrator in the direction channel is the direction rate signal. Both of the integrator voltages are used by the autopilot to determine the amount and direction of control required to bring the missile back on course. Without these signals, the autopilot could only detect heading errors, not off-course conditions.
The accelerometer measures any force applied to the missile. The force of gravity is applied to the missile throughout its flight, and some types of accelerometer will be effected by it. In order to prevent a false output, the effect of gravity must be neutralized, so that only the true acceleration of the missile will be measured. This can be done in either of two ways. A part of the second integrator output can be fed back to the input of the first integrator, as in figure 10B1. Another system compensates for the effect of gravity by applying a fixed voltage bias to the output of the first integrator.
DISTANCE CHANNEL. The operation of the distance channel is much like that of the direction channel. The output magnitude of the first integrator indicates missile longitudinal velocity. The second integrator output voltage is proportional to the distance the missile has traveled. If the system does not start operating until after the launching phase is completed, the missile velocity at that time must be accounted for in the distance computation. A separate signal, representing initial velocity, must be fed to the input of the second integrator. It can then be combined with the output
of the first integrator to indicate missile velocity at any given instant.
A comparison must be made between the distance the missile has traveled and the known distance between the launch point and the target. To do this, a voltage representing the distance to be traveled is set up as an initial condition just before missile launching. This preset voltage is combined, with opposite polarity, with the output of the second integrator. Thus the output of the distance channel decreases as the flight progresses. When the output falls to zero, the target has been reached.
There is one drawback to this system-the fact that for flights of several thousand miles, very large integrator output voltages would be required to get an accurate indication of distance traveled. The preset voltage that represents the target range would be equally large. In order to keep these voltages within reasonable limits, the voltage representing distance covered is continuously programmed during the flight by a suitable device such as a tape recorder. The programmed distance is compared to the measured distance, as represented by the computer output, in such a way that both are carried as reasonably small quantities.
Figure 10B2 shows another method of keeping signal voltages within reasonable limits by using a specified velocity signal. The specified velocity signal is combined with the first integrator output so that any voltage above or below the specified voltage is fed to the second integrator as an error signal. The output of the second integrator is then proportional to the missile error from the desired position on the course.
An inertial guidance system, such as the one just described, would be all that was needed if the missile flew straight and level at all times. But outside factors, as well as some
Figure 10B2.-Computer using specified velocity.
172
Figure 10B3.-Basic gyro-stabilized system.
errors introduced by the equipment itself, prevent straight level flights. Therefore a means for stabilization must be provided.
GYRO-STABILIZED SYSTEM. To get flight stability, the accelerometers must be mounted on a stabilized platform so that they will remain parallel to the earth and detect only accelerations relative to the earth's surface.
Figure 10B3 shows how accelerometers may be stabilized by mounting them on a gyro-controlled platform. The gyros are arranged to detect errors in the pitch, roll and yaw axes of the missile. Thus the output of the gyros will indicate any departure from stable flight. The error signal voltage is amplified and fed to a servo mechanism that corrects the platform position.
A previous chapter in this text explained how the gyro may drift because of bearing friction. Accuracy requires that compensation for gyro drift be provided. The compensation is obtained by adding an integrating loop to the system, as shown in figure 10B4.
Two loops are shown, one representing fast control and the other representing slow integration. Both loops use the gyro error voltage as a control signal. The fast loop functions rapidly to correct platform deviations from a level condition. The slow loop sums up the gyro drift error signals during the complete flight, because it cannot respond to rapid variations. During a normal flight, the random drift from a straight, level condition may be first to one side and then to the other. As a result, the sum of random drift over the entire
Figure 10B4.-Gyro-drift compensation.
173
Figure 10B5.-Gyro precession for tangency with the earth.
flight will usually produce only a small total error.
PITCH CORRECTION FOR EARTH'S CURVATURE. The provision for keeping the platform level and preventing drift introduces a new problem. A normal missile trajectory is an elliptical path above the earth's surface. The gyro's characteristic of being fixed in space would mean that the gyro stabilized platform could be tangent to the earth's surface at only one place. In order to keep the platform tangent to the earth as the missile travels along its trajectory, the forward edge of the platform must be depressed at a rate proportional to the velocity of the missile around the earth. This keeps the platform
level about the pitch axis with respect to the surface of the earth, as shown in figure 10B5.
Normally, gravity is used as a reference for slaving the gyro. But this is not done in an inertial guidance system. Instead, the platform is maintained in a level position by dividing, in the computer, the measured missile velocity by the distance between the missile and the center of the earth. The result of this division is a function of the angular velocity of the missile. The geometric relationship of the velocity factor is shown in figure 10B6. A study of the diagram will show that if the pitch angle of the platform is changed at the same angular velocity, the platform will remain tangent to the earth as the pitch axis changes.
Figure 10B6.-Applying angular velocity to platform leveling.
174
Figure 10B7.-Additions to the computer for angular velocity platform leveling.
The platform angle can be changed by precession of the pitch gyro. This precession is brought about by equipment in the computer section of the missile control system, as shown in figure 10B7.
In operation, the output of the first integrator, which is proportional to the missile velocity, is divided by the distance (R in fig. 10B6) to the center of the earth in order to give the missile angular velocity (W in fig. 10B6) in radians. The result is fed through the gyro torquer to precess the gyro at an identical angular rate.
It would be possible to make similar corrections for roll axis motion. The error in tangency would be small, however, because the missile moves such a small distance to either side of the desired course in comparison to the total length of the flight. Therefore, a simpler process is used to correct for roll. Instead of leveling a platform, a proportional bias voltage is applied to the accelerometer to correct its output signal.
Previous chapters of this text have shown that accelerometers, gyros, computers, and other sections of a complete control system can take many different forms. Individual devices may be mechanical, electromechanical, electronic, or a combination of these types.
10B2. Terminal inertial systems
As mentioned previously, the over-all guidance maybe divided into three phases: launch, mid-course, and terminal. In this section, we will discuss terminal inertial guidance systems. This system uses a stabilized platform as a reference plane to carry the accelerometer sensors for a constant-dive-angle system. The function of any terminal guidance system is to place the missile directly on the target, rather than just in the general vicinity of the target. Thus, an accurate terminal guidance system can compensate for minor inadequacies in the mid-course guidance system.
The terminal guidance phase starts at a point in space known as the release point. This is where the mid-course guidance system is made inoperative, and the terminal guidance system takes over. There are two specific terminal inertial guidance systems. They are known as the constant-dive-angle system and the zero-lift system.
CONSTANT-DIVE ANGLE. A block diagram for a constant-dive-angle system is shown in figure 10B8. This equipment is able to compute the missile's position, during the dive to the target, with respect to the release point.
The output signals from the accelerometers are changed to velocity signals by the integrator. In the direction channel, signals then
175
176
undergo a second integration to convert them into signals representing position. For a constant-dive-angle approach, the distance channel does not need position-error information. It therefore has only one integrator. The velocity signal is sent to the pitch servo system. If the velocity signal has the correct value, there will be no output from the computer to the pitch servo. If there is an error signal, it is fed to the pitch servo, which then corrects the dive angle.
VERTICAL-DIVE SYSTEM. The vertical-dive system is a variation of the constant-dive-angle system. The principle difference between the two is the location of the release point with respect to the target position. The constant-dive-angle system has the dive starting at a considerable lateral distance from the target. The system then sets up a constant-dive-angle which is maintained all the way to the target. The vertical-dive system release point is almost directly over the target, so that the missile can dive straight down.
The nose-over maneuver is accomplished by precessing the vertical gyro of the missile autopilot about its pitch axis. While there are a number of factors that determine the amount and rate of precession of the vertical gyro, the dive angle path to be followed is the primary factor in determining the number of degrees of vertical precession. The angle of incidence of the wings is another factor. This angle of incidence introduces a dive trajectory problem as shown in figure 10B9. Looking at the top drawing, we see that if the missile longitudinal axis were absolutely vertical, there would be some lift from the wings, which would pull the missile out of its vertical dive. In order to compensate for the lift of the wings, the controls are set for a slight over-control, so that the lift from the wings will keep the missile in a vertical dive.
When the pushover arc is completed, the missile is at the dive point. The autopilot is then cut off from the yaw and pitch servos, and has no further effect on the missile flight control surfaces.
ZERO-LIFT INERTIAL SYSTEM. The block diagram in figure 10B10 shows the zero-lift inertial system and the relation between it and the missile autopilot. This equipment has two functions. The first is to establish the flight path, which is programmed on tape. The programmed pulses drive a constant-speed
Figure 10B9.-Missile dive attitude.
motor, whose rotor drives the moving arm of a potentiometer. The second function is to keep the missile on the programmed path through the action of the accelerometer.
To accomplish the first function, the moving contact of the potentiometer must be moved from the ground end of the resistance
177
Figure 10B10.-Zero-lift inertial system.
strip to the other end at a constant rate of speed. Then, if the voltage between the moving arm and ground is plotted against time on a graph, the result will be a straight line. When this straight-line voltage is fed into a motor, the resultant displacement of the motor's rotor is an integration of the input voltage. Because the integral of a constant-slope line is a parabolic curve, the missile path from the release point to the target will be as shown in figure 10B11.
With a parabolic path as a reference for the pitch axis, the missile will try to follow that path. However, because of the wing angle and the engine thrust, the missile will actually fly a different path unless some compensation for these factors is made.
Compensation is provided by an accelerometer that is mounted so as to be sensitive to
accelerations along the vertical axis of the missile. Therefore, if the wings exert a lifting force, the accelerometer senses the lift and originates a signal that corrects the vertical gyro precession. If the wings are exerting some lift due to a programmed signal, the signal from the accelerometer adds to the programmed signal in the mixer stage and causes the gyro to precess at a faster rate. If the missile noses over too far, there will be negative lift and the accelerometer sends a signal that subtracts from the programmed signal in the mixer, and slows up the precession rate of the gyro. Thus the missile flies the course shown in figure 10B11.
The actions just described provide the basis for the name of the system. The name zero-lift is used because the signal from
178
Figure 10B11.-Flight path of zero-lift inertial system.
the accelerometer compensates for any lift in the vertical axis of the missile.
10B3. Celestial-inertial system
Celestial navigation has been used for many years. The navigator uses a sextant to measure the angular elevation of two or more known stars or planets. From these measurements, a ship's position can be plotted.
The celestial-inertial navigation system uses a simplified approach to the problem; it uses an inertial system that is supervised by a series of fixes. One of these systems is known as STELLAR SUPERVISED INERTIAL AUTONAVIGATOR (SSIA); another is called AUTOMATIC CELESTIAL NAVIGATION (ACN).
In the stellar supervised autonavigator, periodic sights are taken on known planets or stars to check on gyro drift. As explained in another chapter, random gyro drift varies in both direction and magnitude. Because the slow-loop correction cannot predict the random drift of a gyro, we have an error that tends to increase with time. A probable error
of one-half mile might be introduced during a flight of 45 minutes or so. Naturally, the error will increase with time.
One method that can be used to overcome random drift error involves the use of celestial sights. This is accomplished in much the same manner as a human navigator might check his position by sighting on the horizon and a known star. But the missile does not carry a human navigator; it must use a mechanical substitute. This device is an automatic sextant, so mounted that it can be moved in both elevation and azimuth. A combination mounting is shown in figure 10B12. The sextant is moved on two axes by motors. These motors are connected to the sextant-positioning system as shown in figure 10B13.
Operation of the system is programmed on a tape, which is pulled through a tape reader at a constant speed. The signal from the tape contains elevation and azimuth commands. These are fed to the proper control circuits. The tape is recorded before launching, and contains all the necessary position and rate data for the complete flight. To get accurate position checks, the sextant azimuth and
179
Figure 10B12.-Automatic sextant.
elevation information must be read from the tape at the proper time. This is important because a star is at a particular angle with respect to a certain spot on earth only at a particular instant of time.
The sextant is aimed at a given star by information taken from the tape, and then follows the star from programmed information on the tape, The sextant position is varied by
servo motors operating from the tape information. The automatic sextant output is fed into an error-detecting system, which is shown in block form in figure 10B14.
A scanner is used to detect errors in centering the star in the field of the sextant. The scanning system includes a light chopper or interrupter, and a phototube. If the star is not centered, an error signal is generated. This signal is then processed to give an indication of the sextant error.
As shown in figure 10B14, the stellar error-detection circuit has several output voltages that are proportional to the missile error in pitch, roll, and yaw. The light from the star, after passing through the scanner, falls on the light-sensitive cathode of the photocell. The cell output voltage is proportional to the light intensity. The output is fed to a selective amplifier that separates the signal from the noise. The amplifier output is then fed through a detector section to a resolver, which breaks down the signal into azimuth and elevation error signals.
The direction resolver has two outputs. One goes directly to the yaw comparator; the other goes to a second resolver section. The
Figure 10B13.-Sextant-positioning system.
180
Figure 10B14.-Stellar error-detection circuit.
second resolver is controlled from the tape signals. The same signal that sets the sextant position sets the resolver for elevation error output. Unless the elevation signal is resolved in this manner, there is no way to determine the axis, pitch, or roll, in which the error exists.
If the sextant were raised and pointed directly forward along the missile heading, any elevation error signal from the sextant would be assumed to be an error about the pitch axis. If the sextant were pointed out the side, in a laterial direction, any elevation error would be a function of missile roll. Therefore a resolver is necessary to determine whether the error signal is caused by pitch, roll, or by a combination of the two.
An ideal way to use a star-sighting system is first to check a star whose line of position is parallel to the missile course, and to then check another whose line of position is at right angles to the missile course. The information from the first star would then be applied to the computer direction channel, and that from the second would go to the distance channel. These signals would then correct the gyros to a new position, and compensate for
any gyro drift that might have occurred. The gyro outputs are fed to the autonavigator, which corrects the course. The pitch and yaw errors are corrected in the same manner.
10B4. Automatic celestial navigation
The most difficult problem to overcome in the system just described is gyro bearing friction. The problem may be solved by using a continuously supervised system. The automatic celestial navigation (ACN) system is continuously referenced by stellar fixes. This does not mean that there is no longer a necessity for inertial supervision; the inertial principle is still used by the autopilot between guidance commands.
The platform equipment for ACN requires one or more automatic sextants in addition to those already mentioned. Two sextants operate simultaneously to obtain a series of fixes, rather than a line of position. With fixes on two stars at the same time, there is less chance of error. It is possible that a standby sextant might be added to the equipment, so that it can zero in on the next star in the
181
navigation sequence without interfering with the fixes that are being made.
One disadvantage of the multiple sextant system is the need for a window big enough to view a large area of the celestial sphere. Such a window would need optical characteristics that would add greatly to its cost. In addition, the larger window area is more subject to damage by natural forces at high speeds.
LIGHT DISPERSION BY SHOCK WAVES. As light passes through any light-conductive material, a certain amount of refraction or bending, takes place. The higher the density of the material, the greater is the degree of bending. Rays of light are refracted when they pass obliquely through the shock waves that are generated by any missile traveling (in air) at or above the speed of sound. This effect may be severe enough to limit the use of celestial navigation to missiles operating at less than sonic speeds, or those operating out of the atmosphere. Figure 10B15 shows the effect of shock waves on optical systems.
NOISE FILTERS. In a practical application, noise exists in the output of the velocity-measuring component. The noise is in the form of short bursts, or peaks, of energy. It may be effectively removed by choosing component values to give the proper time constant (delay) in the circuit. But a filter of this type is not suitable for use in removing noise of a continuous nature. If some steady error, due to noise, is present in the signal that indicates
velocity, the entire computer output will be in error. The elimination of errors caused by noise requires a circuit that will block noise error signals but pass other signals. A circuit with the desired characteristics is a high-pass filter that uniformly passes a-c of the higher frequencies, but blocks any signal of a lower frequency.
High-pass filters using inductive and capacitive components are easy to construct; but precision components are necessary to get sharp frequency characteristics, and this fact increases the cost considerably. To avoid costly components, a d-c amplifier with integrator feedback is used as a high-pass filter.
The integrator section is designed to respond slowly to an input signal. It may take as long as 10 minutes for the integrator signal to build up enough to cancel a steady amplifier input signal. Therefore, all voltages that vary at a faster rate will go through the circuit before the feedback becomes effective.
10B5. Terrestrial reference navigation
The search for accurate, foolproof missile guidance systems has turned up many possibilities. Some of those that seem the most fantastic are based on sound reasoning. The examples that follow fall into this category.
Several picture and mapmatching guidance systems have been suggested and tried. The purpose of an electronic unit of this type is to
Figure 10B15.-Effect of high speeds on optical systems.
182
compare a photo or map carried in the missile with an image of the terrain the missile is flying over at that time.
The basic idea can be shown by using the common photograph as an example. If a photographic negative is placed over a positive (print) from that negative, the entire area will be black. If the positive were in the form of a transparency, the entire area would be opaque and no light would get through. If either the negative or the positive is moved slightly with respect to the other, light would show through where the two prints were out of register (not matched). If one transparency, say the negative, were in the form of a strip that was pulled through a frame or window by a servo motor, it would be possible to devise a control system that would automatically match the images. However, instead of a transparency for the positive image, the projected image of the terrain from a lens or radarscope would be used.
Daylight systems are ruled out because they would be seriously affected by clouds, fog, and smoke. The use of photographs of the actual course or target area would not be suitable for the reasons outlined above, and because such a system would be susceptible to countermeasures. On the other hand, a radar map-matching system has greater effective range, and is not limited by conditions of visibility.
RADAR MAPMATCHING. Figure 10B16 shows a block diagram of a guidance system that uses radar mapmatching. The sections of the diagram in which we are most interested are those labeled radar, PPI, lens, scanning motor, map, holder, and phototube.
In operation, the comparison is made by projecting the radar image from the PPI tube, through a negative radar map transparency of the same region, onto a photomultiplier tube. When the image from the PPI tube exactly coincides with the map image, minimum light gets through to the photomultiplier tube. The lens through which the PPI image passes is rotated in much the same manner as a radar antenna is scanned. The mirror rotation causes the PPI image to be moved in a small circular pattern over the film. When the output of the photomultiplier tube amplifier is properly commutated by the commutator section, left-right and fore-aft information is obtained.
The pulses from the commutator are applied to d-c discriminators and integrators. Then, as shown in figure 10B16, the information is fed to two loops, lateral and longitudinal. The left-right information is fed to a servo amplifier which drives the film carriage laterally to keep the images matched. The position of the carriage is picked off as an error signal voltage for the missile control system. As the missile turns on its yaw axis, to correct the heading, the film carriage is moved and the error cancels out.
Fore-aft information is fed to the longitudinal servo loop that pulls the film through the holder at the correct speed to maintain a match between the film image and the PPI tube image. This means that the film speed must be proportional to the groundspeed of the missile. It is possible to key the film to indicate the location of a change of course or to start the terminal dive action.
Errors can result from a difference in altitude between reconnaissance (radar mapping) and tracking (actual missile flight) runs because of slant range distortion and altitude-return delay.
It is necessary to have angular matching to within one degree before accurate left-right and fore-aft information can be obtained. Angular matching can be obtained by means of a magnetic auxiliary such as a compass. Matching is maintained by the azimuth loop of the system.
Two types of film holders can be used. The frame type is the larger, and more complicated mechanically. It switches separate frames into the scanning area and is easier to lock on with the system. However, a better method seems to be the one shown in figure 10B17, in which the film is scanned through a mask with a semicircular opening.
If the film strip used in this system is pulled through the viewer at a speed corresponding to the missile ground speed, its length will be about 1/20 of that required for a frame-type map.
The reference maps may be obtained by actual radar mapmaking flights over the terrain that is to be traversed by the missile. These flights may be made at high altitudes in almost any kind of weather. Another method involves the use of synthetic maps.
The synthetic maps are prepared by using maps of the area, aerial photos, and other
183
Figure 10B16.-Radar mapmatching systems.
184
Figure 10B17.-Film holder operation for a strip map.
information. A relief map is built up from this information and then photographed. Maps prepared in this manner are only slightly inferior to actual maps.
Radar mapmatching is limited by the capacity of the film magazine, and it cannot be used over water, or over land that lacks distinguishing features. The system is also subject to electronic countermeasures, but it has some immunity because of the highly directive antenna system.
Therefore, this system is best suited for use as a part of a composite system that uses non-radiating midcourse guidance. The map-matching system would be used for a minimum time prior to the arrival of the missile at the target. This method affords the greatest element of surprise, and represents the best method of evading countermeasures.
MAGNETIC REFERENCES. The use of the earth's magnetic field as a reference for missile guidance systems has been discussed in another chapter. The sensor units used in this system are refinements of the simple magnetic compass, and are called the flux gate compass and the gyrosyn compass.
Studies made during the International Geophysical Year, and the information obtained by submarine cruising under the ice at the North Pole, have given new insight into the nature of
the earth's magnetic field. These studies will continue. And, as more information is gained, magnetic reference systems will become more practicable.
The present accuracy of magnetic systems is within about 7 miles, but is limited to the course line only. This means that a missile using this system would need to be launched near, or flown to, the vicinity of a line of magnetic intensity that crossed the target area. Magnetic storms would prevent the use of the system until the earth's magnetic field returned to normal.
Keep in mind that, as more knowledge is obtained about the behavior of the magnetic field, it may become possible to predict magnetic conditions in much the same manner as weather is predicted today. There is, according to present knowledge, one major difference in the two types of predictions. Weather predictions may prove inaccurate for a given area because of purely local conditions. On the other hand, the earth's entire magnetic field is disturbed under magnetic storm conditions, and there are no strictly local effects. Should extremely accurate magnetic conditions forecasts become feasible, it is possible that the disturbed conditions might be used to advantage in missile guidance.
185
CHAPTER 11 GUIDED MISSILE SHIPS AND SYSTEMS
A. Introduction
11A1. General
This chapter will describe the current guided missile ships and systems of the Navy. For reasons of national security, the material that can be published about the operational and technical characteristics of missiles, missile systems, and missile ships is necessarily limited. However, this chapter will orient the student to the missions, functions, and general nature of the Navy's missile program. The confidential supplement to this volume will describe in more detail those characteristics of missile ships and systems which have been omitted here because of security.
11A2. Mission of missile ships
Before proceeding with the missions of missile ships, it is necessary that the reader be familiar with certain definitions.
The MISSION of a ship is a BROAD STATEMENT of its designed purpose in the Navy. In a more restricted sense, the term MISSION can be applied to the component parts of a ship. Thus the term is also used in reference to missile systems.
Tasks of the mission specifically define what the ship is expected to do at a given time. There are two broad categories into
which missions are sometimes divided-STRATEGIC and TACTICAL. These words are linked to STRATEGY and TACTICS. A full discussion of the meaning and significance of these terms could extend the length of this chapter. However, quick insight can be grasped by remembering that tactics is the art of battle, and that strategy is the art of war. Therefore, a tactical mission is one that has a direct influence on the course of battle in progress. A strategic mission' is far-reaching-it is one that has no direct or immediate influence. The job of providing close fire support to permit the advance of friendly troops would be tactical in nature. The destruction of ball bearing factories deep in enemy country, thereby affecting the enemy's war-making potential, would be strategic.
To explain further, tactical targets, as opposed to strategic ones, are fleeting in nature; they can be successfully attacked only by weapons that can reach them in minimum time and with a high degree of accuracy. One should not consider, however, that these definitions are hard-set. For example, consider the destruction of an enemy airfield. In one phase of a battle this may only have strategic significance. But the destruction of the same airfield in support of a landing operation would have tactical significance.
B. Types of Missile Ships
11B1. General
Because of the rapid changes brought about by many recent scientific breakthroughs, the design of missile ships or missile systems is not yet firm. Prototypes tend to become
obsolescent before they can be put to use. But there are certain patterns that can be considered fundamental. At the time of writing this text, most missile ships are conversions from older ships. Conversion rather than construction is an economical approach
1 STRATEGIC MISSION: a mission directed against one or more of a selected series of enemy targets with the purpose of progressive destruction and disintegration of the enemy's war-making capability and his will to make war. Targets include key manufacturing systems, sources of raw material, critical material, stockpiles, power systems, transportation systems, communication facilities, and other such target systems. As opposed to tactical operations, strategic operations are designed to have a long-range, rather than immediate, effect on the enemy and his military forces. (Dictionary of U. S. Military Terms for Joint Usage.--OpNavInst 3020.1B)
515354 O-59-13
186
to a guided missile Navy. In many ways it is a necessary approach, since as yet missiles cannot perform all the tasks that might be expected of them. There are still some jobs that a gun can do better than a missile. In addition to the conversions there are, in building and planning, ships designed from the keel up as missile ships.
11B2. Guided missile cruisers
In general, the mission of missile cruisers is to provide medium- or long-range AA defense, to bombard enemy shore installations, and to conduct combat operations against enemy surface craft.
Some of the tasks assigned to missile cruisers are: to provide effective AA defense of task forces, by means of missiles, at ranges greater than those obtainable with conventional guns; to provide close-in defense against enemy air attacks with AA guns; to provide defense against enemy surface attack; to control aircraft; and to bombard. Those cruisers equipped with assault missiles, such as Regulus, would be assigned additional tasks for the launching and control of these surface-to-surface missiles.
It is interesting to note that in addition to the above tasks, cruisers are being designed to include an ASW capability. This will enable them to provide defense against enemy subsurface attack, and thus permit a field of action much greater than that of older cruisers. Figure 11B1 indicates a possible task force formation of the future. Note that the cruisers have no need for direct ASW support, and that the force is spread out over many miles of ocean.
There are several classes of guided missile cruisers. First, there are the CAG (Terrier) conversions. Figure 11B2 is a picture of the USS Canberra (CAG-2). This class of ships is the result of conversion of World War II heavy cruisers. From outward appearances, the conversion consists of removing the after 8"/55 triple turret with all its accompanying equipment, and substituting two twin Terrier launchers and two Terrier guidance systems. However, the details of the conversion are more comprehensive than they might first appear. The reader will realize this upon completion of section "C" of this chapter, which describes the extent of the CAG (Terrier) weapons system.
Figure 11B1.-A possible disposition of a missile-equipped carrier task force.
Figure 11B3 shows a second class of missile cruisers-the CLG (Terrier) class. These ships are conversions of World War II light cruisers. The armament of the CLG (Terrier) consists of the following:
A CLG (Terrier), converted to include fleet flag facilities, will have further modification of its gun batteries.
Of the CLG (Terrier) conversions, the USS Providence, Springfield, and Topeka will become the CLG's 6, 7, and 8, respectively.
Another class of guided missile cruiser is the CLG (Talos). For the purpose of this book, the only significant difference between the Terrier- and Talos-equipped CLG's is in the capabilities of the missiles themselves. The CLG (Talos) is converted from the same class of light cruiser, and the resulting armament is essentially the same as that described for the CLG (Terrier). In the CLG (Talos) class, there are the USS Galveston, Little Rock, and Oklahoma City, CLG's 3, 4, and 5, respectively.
Other cruisers, such as the Macon, Helena, Toledo, and Los Angeles, are currently equipped to stow, launch, and guide the Regulus I
187
Figure 11B2.-USS Canberra (CAG-2).
Figure 11B3.-The CLG (Terrier).
assault missile. Tactically, the assault missile's main target would be enemy land-based facilities; but the missile can also be directed against enemy surface craft. Figure 11B4 shows the USS Helena (CA-75) making preparations to fire a Regulus missile from her fantail launching position.
To complete the picture, there is the guided missile cruiser which has been designed from the keel up as a "double-ended" guided missile ship. Figure 11B5 is an artist's interpretation of the USS Long Beach (CGN-9), which will be armed with both long- and medium-range SAM' s and the latest ASW armament (ASROC).
11B3. DD-type missile ships
Present planning provides for two families of destroyer types having a missile capability. The first of these is the guided missile destroyer (DDG). The DDG is similar to the conventional destroyer in displacement and other general characteristics. The second DD family is the guided missile frigate (DLG). The DLG is the big sister of the DDG, with longer endurance and better sea-keeping abilities.
The mission of the DDG is to screen task forces and convoys against enemy air, surface, and submarine threats. Figure 11B6 is
188
Figure 11B4.-Regulus I in readiness on USS Helena (CA-75).
Figure 11B5.-USS Long Beach (CGN-9).
a picture of the USS Gyatt missile conversion, a prototype for the DDG classes to follow.
The primary mission of the DLG is to screen fast task forces. Figure 11B7 is an artist's interpretation of the DLG-16 class, an advanced design of an all-missile DD type. Some of the principal data about the DLG-16 class is as follows:
Missile battery:
2 twin Terrier launchers
4 Terrier guidance systems
Gun battery:
2 3"/50 RF twin mounts
ASW:
ASROC and ASW torpedoes
The appearance of the DLG-16 class is exceptionally "clean," because the boiler uptakes are incorporated with the radar masts.
11B4. Guided missile submarines
The primary mission of the guided missile submarine is to deliver guided missile attacks against enemy shore installations. Its tasks include the launching and control of missiles, and self-defense by means of underwater-launched weapons. Two families of guided missile submarines now seem to be emerging. The first are those designed to carry the Regulus, "air-breathing" variety of missiles. The second are submarines designed to carry the Polaris ballistic-type missile.
189
Figure 11B6.-USS Gyatt (DDG-712).
Figure 11B7.-The DLG-16 class.
11B5. Other missile ships
The Navy intends eventually to replace most of its conventional gunnery systems with missile systems. Time and money appear to be
the only quantities limiting the speed of this development. In the future, aircraft carriers, amphibious craft, and service craft will take their place in the missile Navy.
C. Surface Ship Missile Systems (CAG-Terrier)
11C1. General
This section will outline the fundamentals of a surface-to-air missile system as it might be found on a surface ship. Specifically, this section will take up the Terrier SAM system as found on the CAG's USS Boston and USS Canberra. The missile systems on these ships may be considered typical of a surface ship SAM system.
11C2. Organization of missile ships
The organization of missile ships is comparable to that of other ships with similar missions. Most of the equipment and personnel associated with the missiles are under the cognizance of the gunnery officer.
Figure 11C1 is the Gunnery Department organizational chart for the USS Boston (CAG- 1).
190
Figure 11C1.-Organization chart, Gunnery Department, USS Boston (CAG-1).
Men of the Guided Missileman rating are in the 7th and 8th divisions. These men are responsible for the operation and maintenance of the missile itself. Weapons control equipment of the missile system is under the cognizance of the fire control officer.
The missile system also gets an assist from Operations Department personnel, as Radar-men perform certain plotting and liaison functions in the weapons control system.
11C3.(CAG Terrier SAM) missile system
For the purpose of this text, we can consider the Terrier missile system of the guided missile cruisers Boston and Canberra as consisting of four major subsystems. These are:
the missile,
the ship,
the weapons control system, and
the missile stowage, loading, and launching systems.
THE MISSILE. As you will recall from the first part of this volume, the Terrier SAM is a medium-range beam rider, propelled by a solid-fuel sustainer rocket, and launched with a solid-fuel booster.
THE SHIP. The second major subsystem is the ship itself. The ship provides a launching platform. It also provides the basic services necessary for the maintenance and operation of the missile and the missile system. These basic services include electric power, communications, testing facilities, compressed air and nitrogen, logistics support, etc. The ship also provides early warning and other C.I.C. functions required for target acquisition.
191
Some pertinent data concerning the weapons complex on the USS Boston (CAG-1) is as follows:
Length - 673'
Beam - 71'
Full load displacement - 17,000 tons
3 Air search radars - AN/SPS 6c, 8, and 12
1 Designation radar - CXRX
Designation equipment - Mk 7
Missile computers - Mk 100
Other armament as indicated in figure 11C2.
Except for their missile directors, the USS Boston and the USS Canberra are essentially the same conversion. The directors on the Boston are of the "Mk 37" vintage, and are specially adapted for the Terrier with Mk 25 Mod 7 radar. The Canberra has a more advanced design, using the AN/SPQ-5 radar set.
WEAPONS CONTROL SYSTEM. This is the third major subsystem. It encompasses both the gun and missile fire control equipment. Because it is comparatively new, and unique in gunnery, the weapons control system will be described in some detail in this and the succeeding section.
Consider that an aircraft at 20,000 feet, traveling at 600 knots, will reach its bomb-release point more than 10,000 yards from its target. Consider, also, that this aircraft is traveling 20,000 yards a minute, and that the total problem may consist of two, three, or more aircraft. Finally, recall that in order to destroy an aircraft with a missile or a projectile it will be necessary to do all of the following BEFORE the target aircraft reaches its bomb-release point:
(1) Detect the target aircraft with radar
(2) Identify the target as "friend or foe"
Figure 11C2.-CAG armament.
(3) Designate to a selected director until the target is acquired
(4) Obtain a solution with director's associated computer
(5) Assign weapons to the tracking director on a priority basis, and position these weapons in train and elevation
(6) Fire
(7) Wait until the projectile or missile reaches the point of impact with the target
The need for urgency, and the complexity of the AA problem, were the reasons for development of the complex weapons control system found on the CAG's and later ships. The CAG weapons control system was conceived to hold to a minimum the time required for acquisition of targets, and to permit simultaneous engagement of multiple targets. The large number of directors available on the CAG's makes it possible to direct fire against several targets simultaneously.
The weapons control system can be divided into fire control equipment and weapons direction equipment.
The FIRE CONTROL equipment supplies the basic intelligence and control functions for effective engagement of targets by the ship's weapons. Thus, with conventional gunnery, there is a need to compute gun orders. With missiles, there is a need to solve for launcher and in-flight guidance orders.
The WEAPONS DIRECTION EQUIPMENT provides the displays and controls required for the proper utilization of the ship's weapons. This utilization requires full evaluation of targets, assignment of missile (or gun) directors to the proper targets, proper selection of missiles and loading of launchers, tactical evaluation prior to firing, and, finally, continued evaluation to ascertain that targets are effectively encountered and that target priorities remain as first evaluated. Figure 11C3 is a picture of the Boston's weapons control station, which contains most of the weapons direction equipment.
MISSILE STOWAGE, LOADING, AND LAUNCHING SYSTEMS. In general, it can be said that the missile is handled in the same way that conventional ammunition and weapons are handled. However, certain missile characteristics modify the handling and stowage problem. The Terrier missile is heavy and unwieldy,
192
Figure 11C3.-Weapons control station.
since its length with booster is over 26 feet, and its weight is in the neighborhood of 2400 pounds. The electronic equipment, and the powder grains that make up the booster, require a controlled environment in order to maintain missile reliability. If subjected to cold, the boosters and sustainers become brittle and are more likely to fracture upon normal handling. A missile propellant that is cracked will burn faster than it normally should, becoming unreliable and perhaps extremely dangerous. Excessive heat and/or moisture will also have an adverse effect on the missile booster and sustainer propellants.
Each missile launcher has an associated magazine, ready service magazine, and wing-assembly area. The missiles are stored in a condition ready to be launched on short notice. Also, because of the rapidity with which the AA problem develops, provision is made for rapid loading of additional missiles and the jettisoning of malfunctions. With the exception of wing and fin assembly, the Terrier loading cycle is fully automatic.
A more detailed study of missile loading and launching systems will be included in the confidential supplement to this volume.
193
Figure 11C4.-Weapons control system (CAG-Terrier).
11C4. The AA problem
Figure 11C4 is a simplified block diagram that will help the reader to understand the functioning of the CAG (Terrier) weapons system as it concerns the AA problem.
DETECTION AND IDENTIFICATION. A target is detected by the ship's air search radar, by an AEW system, or perhaps by another ship acting as a picket (item 1, fig. 11C4). This target information is presented to CIC and the weapons control station in a conventional manner. The target is interrogated, plotted, and assigned a designation if not found to be a friendly aircraft.
TRACKING, EVALUATION, AND DIRECTOR ASSIGNMENT. This is the phase of the AA problem in which the sophistication of the CAG (Terrier) weapons control system becomes apparent. In addition to the conventional search and fire control radar normally found on Navy ships, the CAG has a designation radar installed as part of the weapons control system. The designation radar is a hemispherical
scan radar, and it provides a continuous 360° HORIZON TO A GIVEN ELEVATION radar scan. Thus, the designation radar will supply range, bearing, and elevation of all targets within its range (item 2, fig. 11C4). All targets within the scope of the hemispherical scan radar are made available as inputs to the automatic tracking (TWS: track-while-scan system) feature of the weapons control system. Automatic tracking is necessary because of the requirement for speed, and because the number of targets may exceed the number of directors available, or the capability of human tracking. The CAG (Terrier) weapons control system is able to retain all target information in a ready-to-use form, for transmission to directors as rapidly as they are able to take successive targets.
Too, because of the limited time available, provision is made within the weapons control system for as much automatic evaluation (as opposed to human operation) and director assigning features as is possible. Thus an
194
aircraft attacking so as to be the most serious threat will automatically be given priority in director assignment.
WEAPONS CONTROL SYSTEM PHASES. Within the weapons control system are three successive phases of actions and equipments, as follows:
PHASE I-This is a combined phase I for gun and missile use, whereby targets are selected by the phase I equipment operators for automatic tracking. These phase I operators, aided by what is presented on their radar scopes and by the information received from CIC, then institute the automatic features of the TWS system. To summarize, phase I equipment provides for display, detection, initial selection, and tracking of targets (item 3, fig. 11C4).
PHASE 11-This and succeeding phases will be discussed only insofar as they concern the missile problem. Parallel capabilities for target acquisition are provided for the gunnery problem (item 5, fig. 11C4). Phase II equipment for missilery provides for evaluation and assignment to a particular missile director, or for rejection as a missile target (item 4, fig. 11C4). If the target is rejected for missilery at this point (or at any other time), designation to a gunnery director must be considered. (The phase II equipment for gunnery will function automatically to assign to a gun director for acquisition any target that meets the priority requirements.) Duplication of effort is prevented by the fact that targets are normally engaged with missiles long before their priority dictates serious consideration by the gunnery assignment equipment.
To sum up what is done in phase II of the missile problem, the phase II equipment operators select and assign priorities to missile targets; they then assign the targets, in order of "threat", to the missile directors for acquisition.
PHASE III-The function of the phase III equipment is to receive and display all the comprehensive information necessary to select launchers and successfully fire the appropriate missiles against the selected targets (item 6, fig. 11C4). Information such as unclear areas, launcher availability, maximum and minimum missile capabilities, present and advance target
position, etc. are available to the phase III equipment operators.
FIRE CONTROL. A director, having acquired the target designated by the weapons
direction equipment, will, together with its
computer, complete a solution. The solution
is in the form of missile launcher orders and
missile guidance orders (item 7, fig. 11C4).
The AA problem is completed when the
target is destroyed, or when a director is released because of change in target priorities.
11C5. Missile logistics
Missile logistics is the problem of keeping the operating forces supplied with a stockpile of missiles and spare parts. Initially, missile components are shipped in sections from the manufacturers to storage depots located throughout the continental United States and at its advanced bases. Each of the sections that make up the missile is packaged in a reusable metal container. The containers are sealed, and contain desicant in order to provide an environment least likely to cause unreliability in the component. When necessary to supply the operating forces with a missile, it is the depot's responsibility to test, assemble, and transfer a complete missile in the form required by the recipient, A missile, being extremely complex and of large unit size and value, requires more care in transport and handling than a conventional round of ammunition does. For this reason, all handling equipment and shipping containers are designed to realize maximum missile reliability.
Once aboard the CAG, the missiles are again fully tested to ensure reliability. Missiles must either pass the rigid tests or be repaired. When any missile component fails in test, it is replaced with a spare and the rejected part is shipped back to a depot for complete overhaul. The CAG is equipped to make minor repairs and component substitutions, but not to make extensive overhauls. All the steps in missile manufacture, storage, handling, and testing are for maximum missile reliability.
Missile ships are equipped to receive replacement missiles both while in port and while under way. Transfer at sea is usually conducted by use of the burtoning method.2
2The burtoning method of transfer is one of the types of rig used to transfer material between ships while under way at sea. Burtoning requires each ship to maintain tension (with a winch) on the load being transferred between them.
195
D. Submarine Missile Systems
11D1. General
The Regulus missile can be considered a typical vehicle when speaking of submarine missile systems. Regulus, as you will recall, is a surface-to-surface tactical missile capable of carrying a high-yield war head. Polaris is another member of the Navy's submarine-launched surface-to-surface missile family. Though Polaris is a ballistic missile, certain functions of the Polaris missile system are similar to those of Regulus systems.
11D2. SSG (Regulus) missile system
The SSG (Regulus) missile system is somewhat less complex than the Terrier system described in section 11C. There are four major subsystems that must be considered to make up the guided missile submarine SSM system. These are: the missile; missile guidance equipment; the submarine; and missile stowage and launching systems.
Figure 11D1 is an inboard profile view of one of the latest SSG's, the nuclear-propelled SSGN-594 class.
The Regulus missile is a turbojet-powered pilotless aircraft. Guidance for this type of missile can be provided by any of several means, such as radio command, radar control, inertial guidance, and programmed flight, or by a combination of these methods. The type of guidance used depends on such things as desired accuracy, cost, simplicity, reliability,
and probable countermeasures. Guidance selection, although it has a direct bearing on the design and operation of the missile system, is beyond the scope of this chapter. This chapter will deal primarily with the fundamentals of the submarine missile system that are common to all guidance techniques.
The third subsystem, the submarine itself, provides a launching platform, basic services, fuel, and other logistic support functions. Also included on the submarine are a navigational system, and missile fire control equipment.
The launching of missiles towards targets miles away can be compared to a very long range gunfire problem. The submarine will usually have no direct observation of the target, or of a known geographical reference. But the position of the guiding craft must be fixed with extreme accuracy. Location, heading, ground speed, and other reference data, all have an effect on the CEP3 of the missile.
The SINS system (ships inertial navigation system) is presently the most sophisticated of the navigational systems now installed on missile submarines. The heart of SINS is an inertial guidance package based on the principles of inertial guidance explained in preceding chapters. Included within SINS are numerous gyros and accelerometers whose function it is to generate the submarine's position and speed, and to establish true north and a vertical reference. SINS, then, acts like a dead reckoning computer/analyzer whose
Figure 11D1.-SSGN-594 class.
3CEP--an abbreviation for "circular probable error" or "circular error in probability." This terminology denotes the accuracy of a weapon. Though having a deeper mathematical significance, it is defined as a circle within which a single weapon has a 50% chance of landing, or expressed differently, one CEP is a radius of a circular area within which 50% of all weapons used will hit.
196
function it is to provide continuous and extremely accurate navigational and reference data. It also has the ability to weigh, analyze, and make corrections to its dead reckoning solution based on optical and electronic navigational inputs.
In addition to the navigational system, a fire control system is included on the submarine. The function of the fire control system is to transfer reference information to the missile, and to control and monitor the missile during preflight checks.
The last subsystem to be considered is for MISSILE STOWAGE AND LAUNCHING. Regulus missiles are stowed in watertight hangars
such as the one shown in figure 11D2. Pictured is the USS Tunney (SSG-282), one of the first U. S. Navy submarines altered for a missile capability.
Referring back to figure 11D1, you can see that in the most modern missile submarines, the missile hangars are faired into the submarine's structure. Thus the submarine is more streamlined, to permit higher submerged speeds.
When launching a Regulus missile, the procedure is for the submarine to surface, ram the missile to its launching position, make the final preparations for flight (final preflight checks and wing unfold), and fire. Once
Figure 11D2.-Missile stowage on USS Tunney (SSG-282).
197
the missile is airborne, the submarine may again submerge and conduct any necessary guidance functions while submerged. Well-trained SSG crews can limit the time on the surface to minutes.
11D3. The surface-to-surface problem
TARGET CONSIDERATIONS. Because of the high unit value of submarine-launched SSM missiles, certain factors must be considered, such as the importance of the target to the enemy, and target nature, vulnerability, size, and location. With strategic targets, these factors are evaluated well in advance of the mission. Tactical targets require faster military decisions. Both planning estimates, however, are usually accomplished on a much higher planning level than the launching ship.
FLIGHT PLANNING. In addition to the target considerations, additional planning must be given to the flight plan of the missile. Regulus missiles, because they are turbojet-powered, fly most efficiently at high altitudes.
Thus, whereas the missile would be most likely to remain undetected at very low altitudes, the range to the target may prohibit such employment. Intelligence and the immediate tactical situation also play an important part in missile planning.
ASSISTED GUIDANCE. This system permits the submarine to launch its missile at a relatively long distance from the target. One or more additional submarines, provided with the necessary guidance equipment, are deployed closer to the target or near known landmarks. Thus a second submarine may furnish accurate guidance during the final phase of the missile's flight, while remaining submerged and thus less likely to be detected. Figure 11D3 depicts a hypothetical case in which an electronically guided surface-to-surface missile is launched by a submarine at a location remote from the target; terminal guidance is provided by two other submarines, one controlling in azimuth and the other in range for maximum accuracy.
Figure 11D3.-SSM flight.
198
E. Aircraft Missile Systems
11E1. General
There are two broad classifications of aircraft missile systems: air-to-air and air-to-ground. The Sidewinder and Sparrow families are examples of AAM systems. Bullpup and Corvus are Navy ASM systems. Figures 11E1, 11E2, and 11E3 are pictures of the Sparrow, Sidewinder, and Bullpup missiles on appropriately configured aircraft.
This section will take up the Sparrow family as a typical aircraft missile system. The student will recall that there are three major missiles in the Sparrow family. Sparrow II will not become operational in the U. S. Navy. Sparrow III, while in many respects greatly different from Sparrow I, has the same general characteristics such as length, weight, and configuration.
11E2. The aircraft (Sparrow) missile system
There are four major subsystems that can be considered to make up the Sparrow missile system: These are:
the missile,
the aircraft carrier (or land base),
the aircraft, and
the missile guidance equipment.
The Sparrow I missile is a beam rider. It includes a war head, an influence fuse, a guidance and control section, power supplies, and a rocket motor. Sparrow I was the nation's first air-to-air guided missile, and is much less sophisticated in guidance principles than its more recent sister, the Sparrow III. Sparrow I is an optically sighted beam rider, while Sparrow III is fully radar operated. Both missiles fulfill the design requisite of having a high single-shot probability of kill and a range longer than can be achieved with conventional AA guns. Up to four Sparrow missiles are carried on appropriately configured aircraft. Missile aircraft can also carry mixed loads of Sparrow and Sidewinder missiles.
Additional data concerning specific airborne missiles is contained in chapter 1, and in the confidential supplement to this text.
The AIRCRAFT CARRIER (or land base) is needed to provide operational and logistic
Figure 11E1.-F3H "Demon" with Sparrow missiles.
199
Figure 11E2.-F9F "Cougar" with Sidewinder missiles.
support for the missile and missile aircraft. Test Equipment, training facilities, and provisions for handling and stowage are included on the mobile base. Additionally, as integral parts of the system, are the fighter director facilities which must direct the missile aircraft to the vicinity of the target. Maintenance of the missile is on a "Go-No-Go" basis, as is the practice with many other operational missiles. That is, missiles which do not pass surveillance or pre-flight tests are rejected, and defective sections are returned to centralized maintenance facilities for repair or overhaul. This system speeds up acceptance testing, and eliminates the widespread need for extensive maintenance facilities.
The missile AIRCRAFT is of course the delivery vehicle. Aircraft configured to carry and launch radar-guided missiles must carry extensive electronic equipment for missile guidance. Other equipment to aid in target acquisition, and to furnish "course-to-steer" and "in-range" information, may also be included on the aircraft as part of the missile system.
The last subsystem is that of the MISSILE GUIDANCE EQUIPMENT. The principle
function of this equipment is to determine the displacement of the missile from the tracking radar beam, and to send the necessary control information to the missile so that the missile will fly the beam.
11E3. The air-to-air missile problem
To illustrate the AAM missile problem, let us take the classic example of an aircraft carrier providing air cover for a task force at sea. Our missile aircraft will be alerted to the presence of an enemy bomber by the force fighter director organization. The missile aircraft will be vectored to the general vicinity of the enemy, where it will be in a position to acquire the target. A proper pursuit course is then followed until firing range is reached. When within range, the missile is fired and is captured by the guidance radar beam. The missile then follows the guidance beam until within destructive range of the target, where an influence fuse will detonate the war head. The above description is of the basic AAM beam-rider system. The more sophisticated the missile system becomes, the more automatic the various steps become.
200
Figure 11E3.-F1 "Fury" with Bullpup missiles.
The earliest AAM missiles required visual contact and mental computations, whereas the latest systems perform most of the steps automatically.
Bibliography
Until the confidential supplement to this text is made available, the following material may
be consulted for further information on the Navy's guided missile ships and systems.
Guided Missile Systems of the Department
of the Navy, dated 3/12/58. Copies should
be requested from the Chief, BuOrd (ReS),
Navy Department, Washington 25, D. C.
BuOrd Information Bulletins
Navy Department technical manuals on specific missiles or systems.